Instalasi Hardware
1. Assembly Robot from Scratch
Design Robot BFC 2024
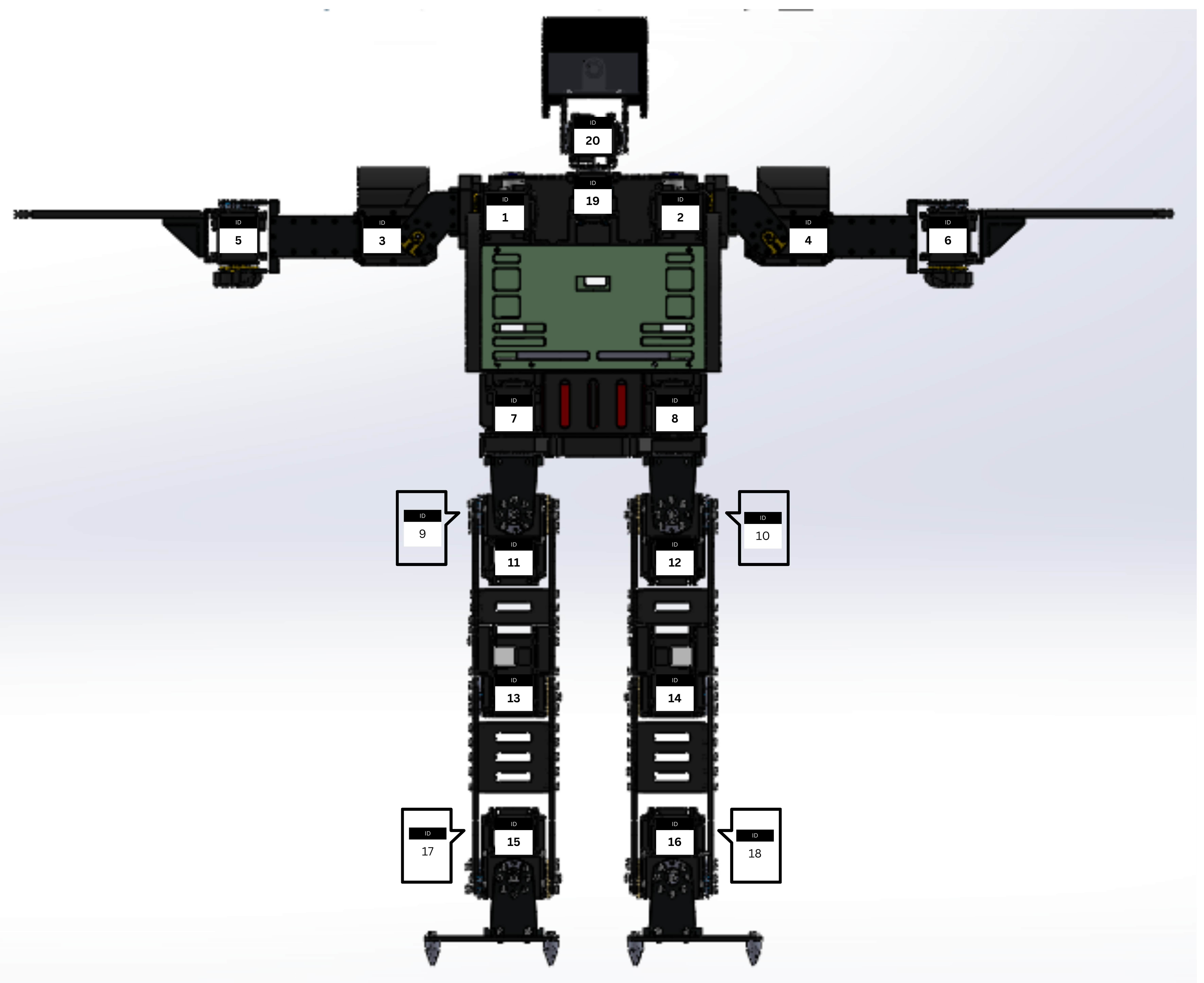
1. Mengetahui ID Motor Servo pada Robot
Robot Humanoid Soccer Kid Size memiliki 20 motor servo, berikut adalah urutan ID motor servo pada robot:
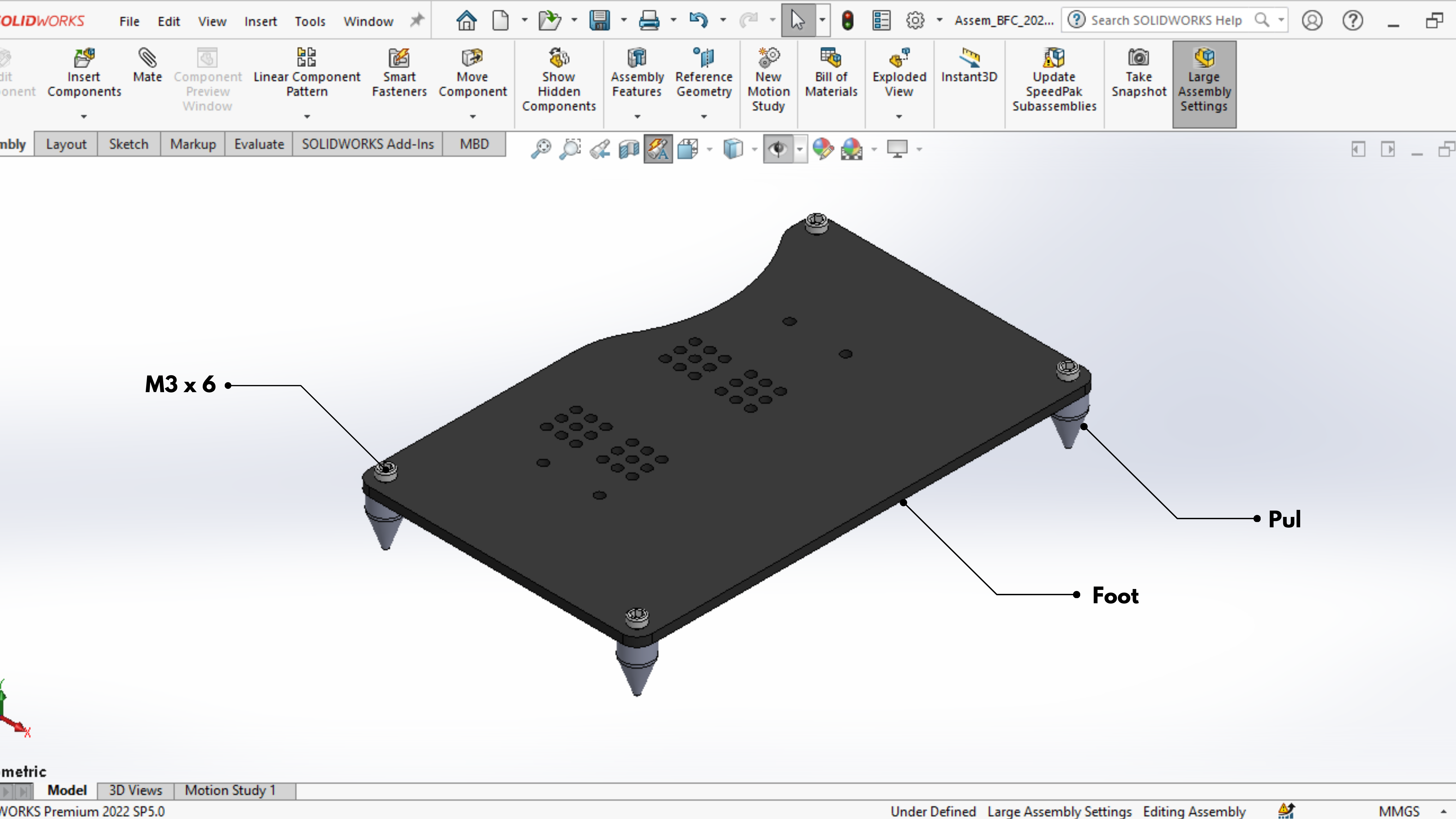
2. Assembly Kaki Robot
Berikut adalah langkah-langkah merakit robot humanoid dari awal hingga akhir:
- Langkah pertama ialah menghubungkan Foot Step dengan 4 Pul menggunakan baut M3 x 6 sebanyak 4 baut.
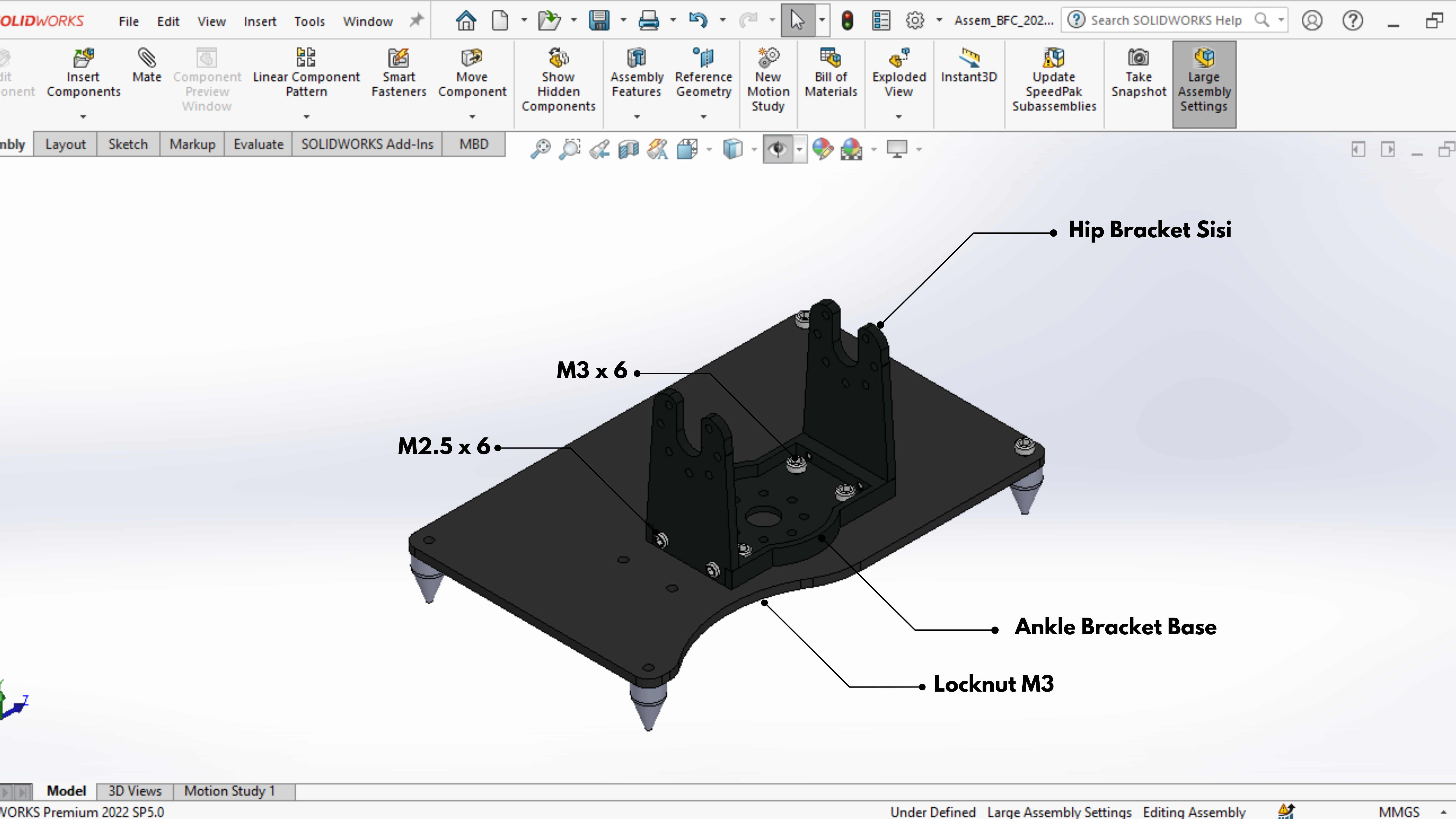
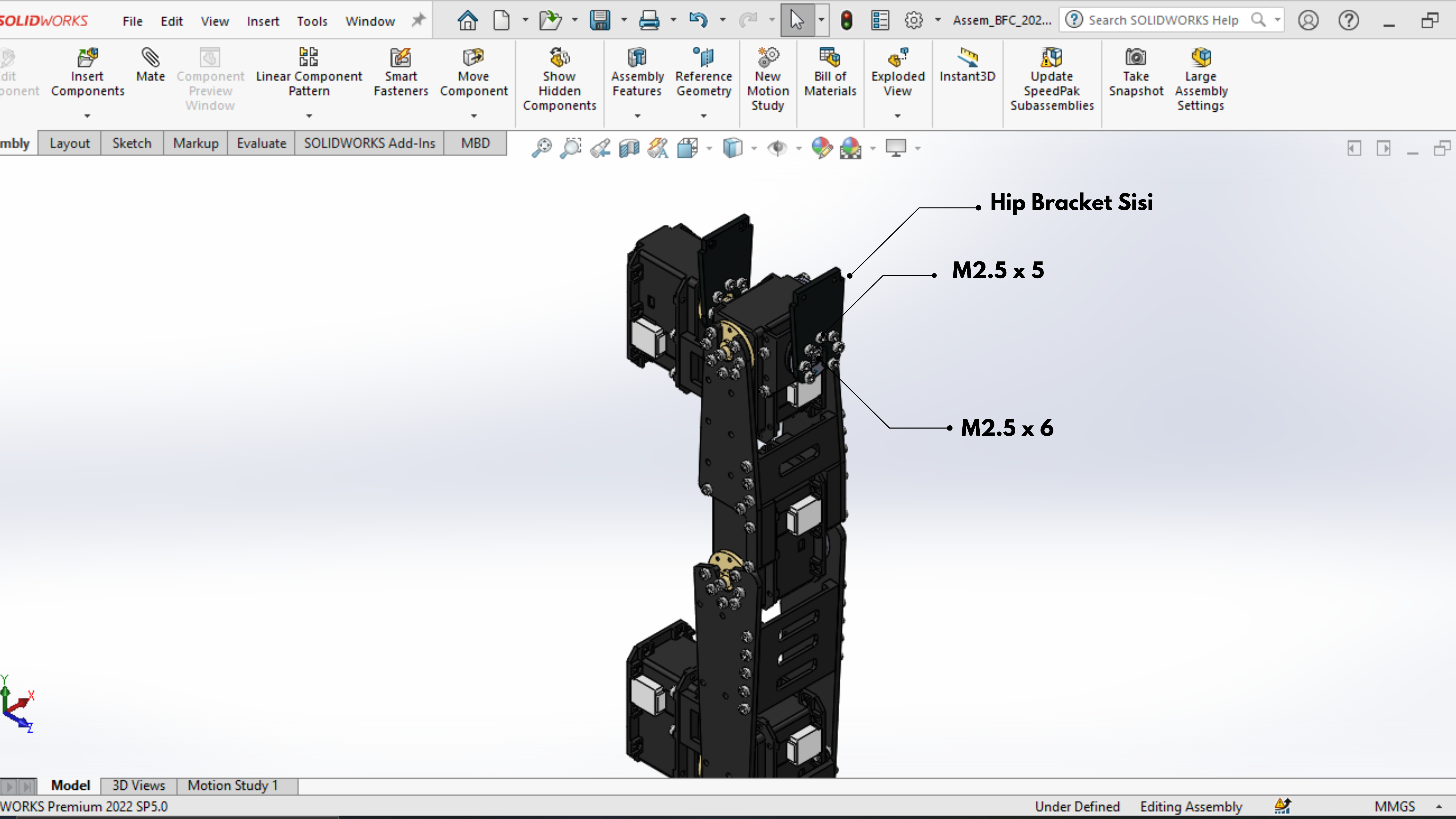
- Kemudian hubungkan Hip Bracket Base dengan Foot Step menggunakan 4 pcs baut M3 x 6 dan dikunci menggunakan 4 pcs Locknut pada masing masing baut tersebut. dianjutkan dengan menghubungkan 2 Hip Bracket dengan Hip Bracket Base menggunakan 4 pcs baut M2.5 x 6 dilengkapi dengan Loctite Thread lock pada masing masing baut.
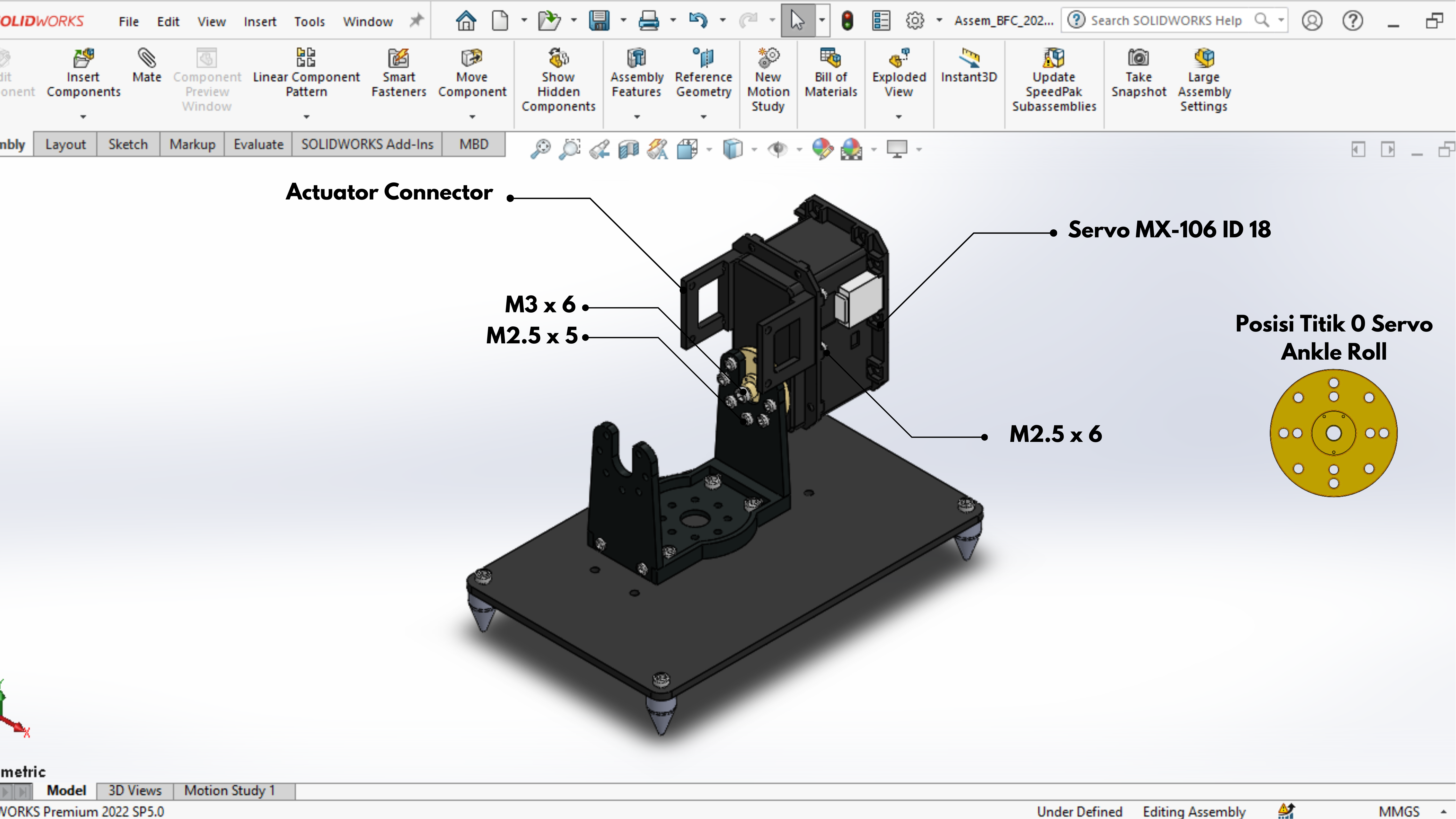
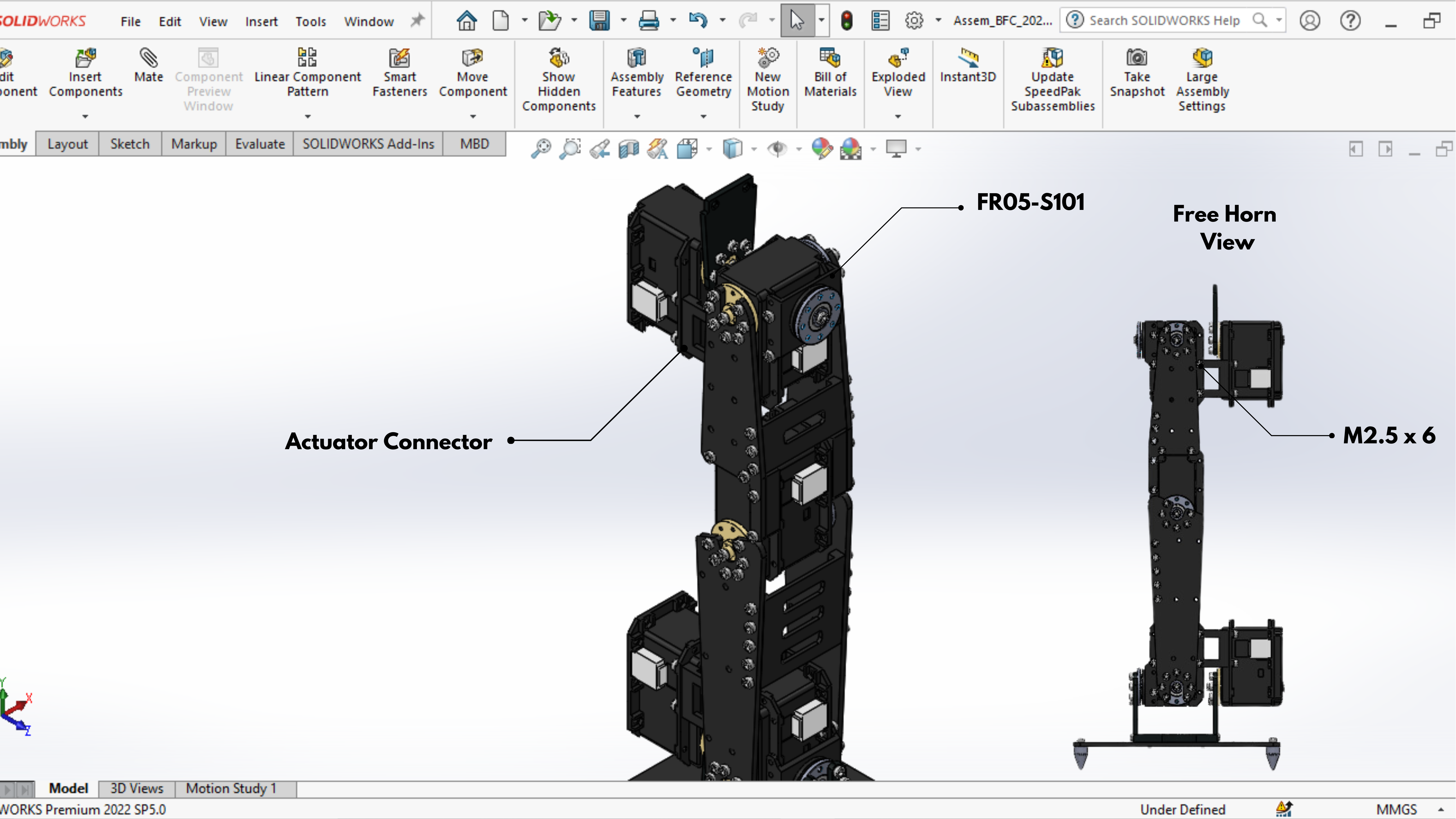
- kemudian siapkan servo MX-106T ID 18, pasang horn servo mengarah ke bawah dan kencangkan baut horn servo menggunakan baut M3 x 6 lalu hubungkan horn servo ke bagian Hip Brakcet menggunakan 7 pcs baut M2.5 x 5. kemudian lengkapi servo MX-106T dengan 1 set Actuator Connector menggunakan baut M2.5 x 6.
- selanjutnya hubungkan Bracket FR05-S101 dengan Hip Bracket Menggunakan 7 pcs baut M2.5 x 5.
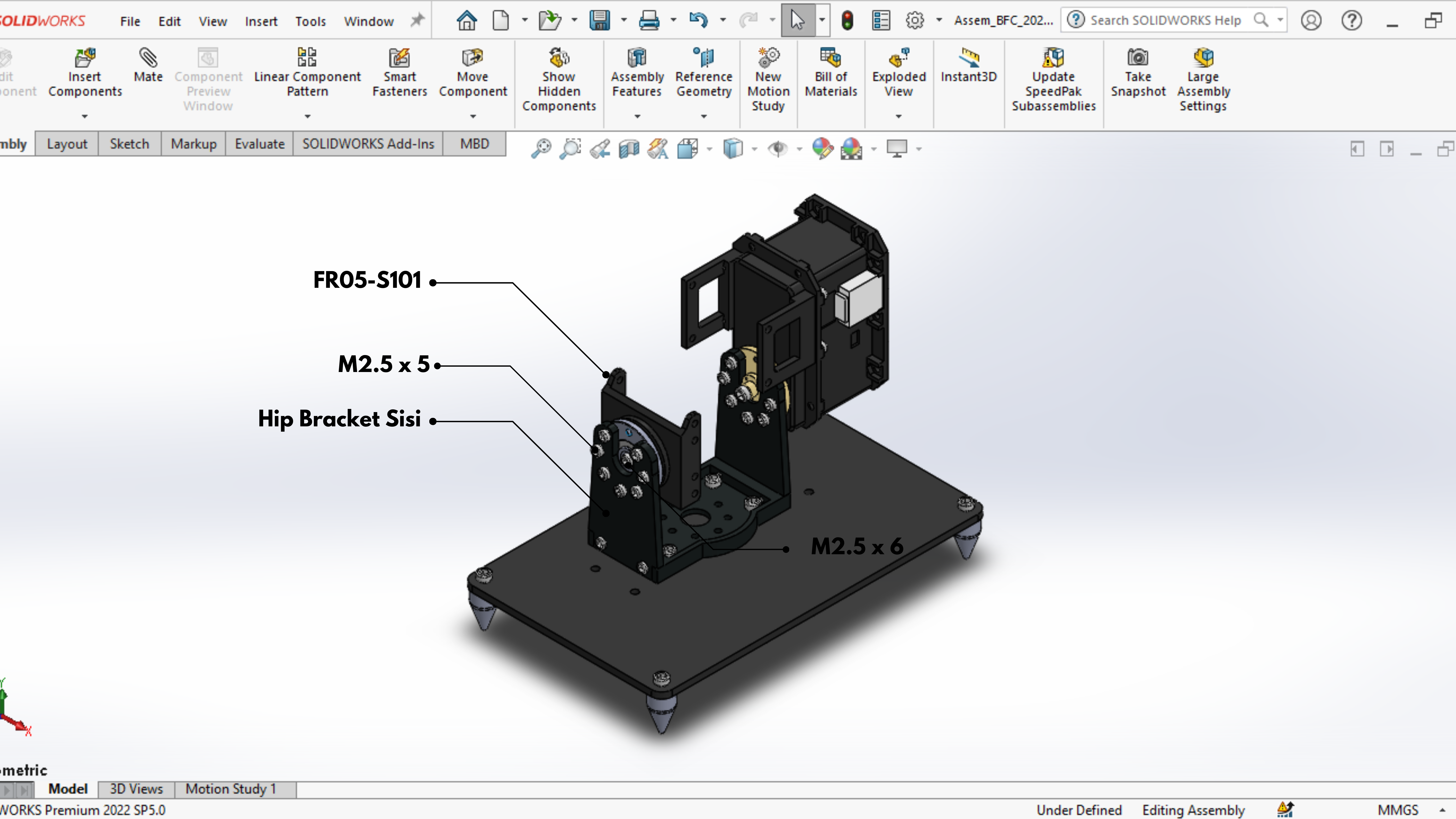
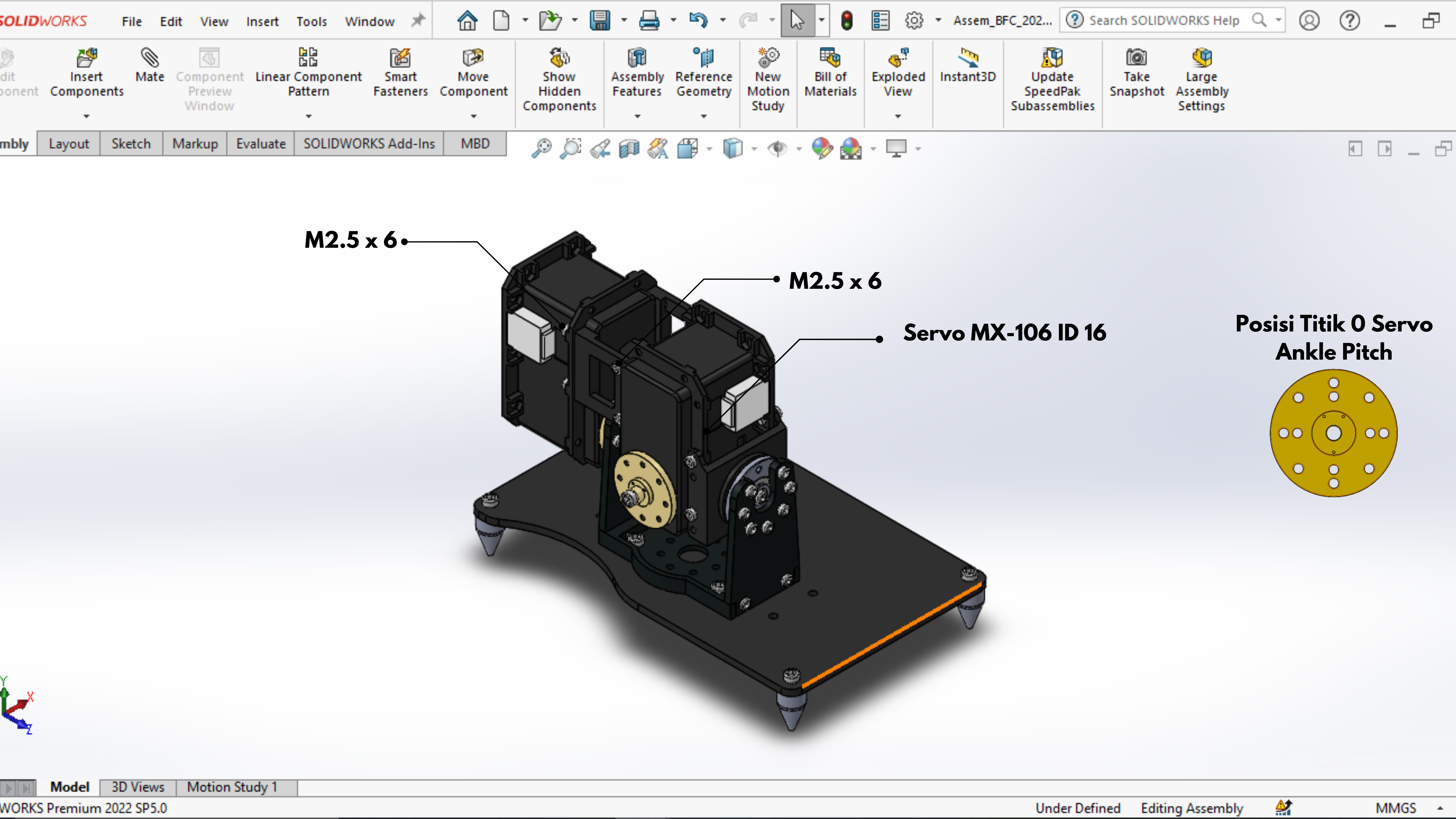
- siapkan servo MX106-T ID 16, pasangkan horn servo menggunakan baut M3 x 6 mengarah ke bawah bagian dalam kaki. kemudian hubungkan servo MX-106T ID 16 dengan bagian Bracket FR05-S101 dan 1 set Actuator Connector menggunakan baut M2.5 x 6 dilengkapi dengan Nut M2.5.
- siapkan 1 set Knee Bracket Sisi kemudian hubungkan pada kedua Horn Servo MX-106T ID 16 menggunakan 14 baut M2.5 x 5. kemudian hubungkan 1 set Knee Bracket Sisi dengan Knee Bracket Base menggunakan 10 pcs baut M2.5 x 6 dan Loctite Thread Lock.
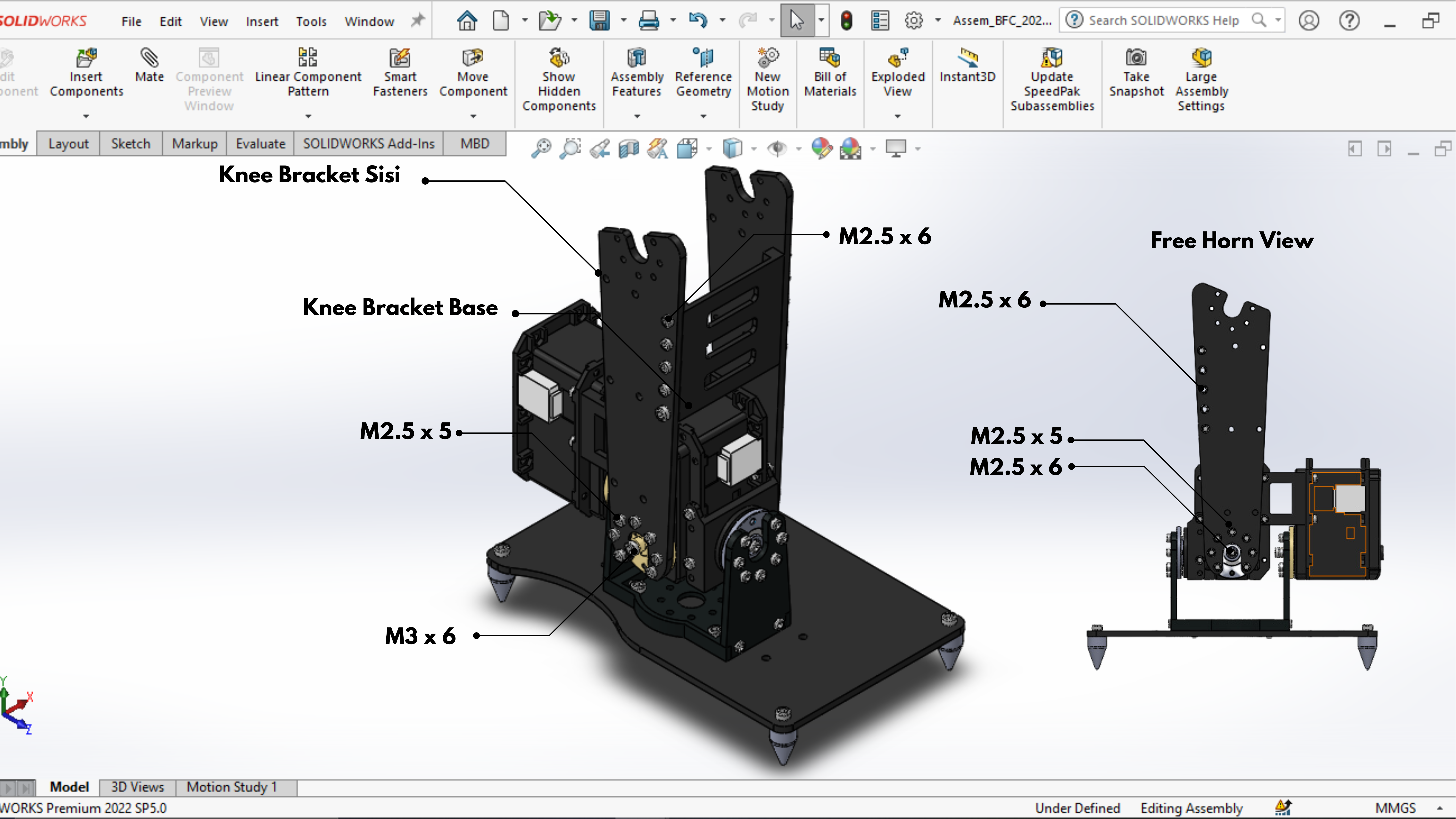
- selanjutnya siapkan Servo MX-106T ID 14, Pasangkan horn servo menggunakan baut M3 x 6 mengarah ke bawah bagian dalam kaki. kemudian hubungkan 1 set Knee Bracket Sisi ke Horn dan Free horn servo menggunakan 14 pcs baut M2.5 x 5.
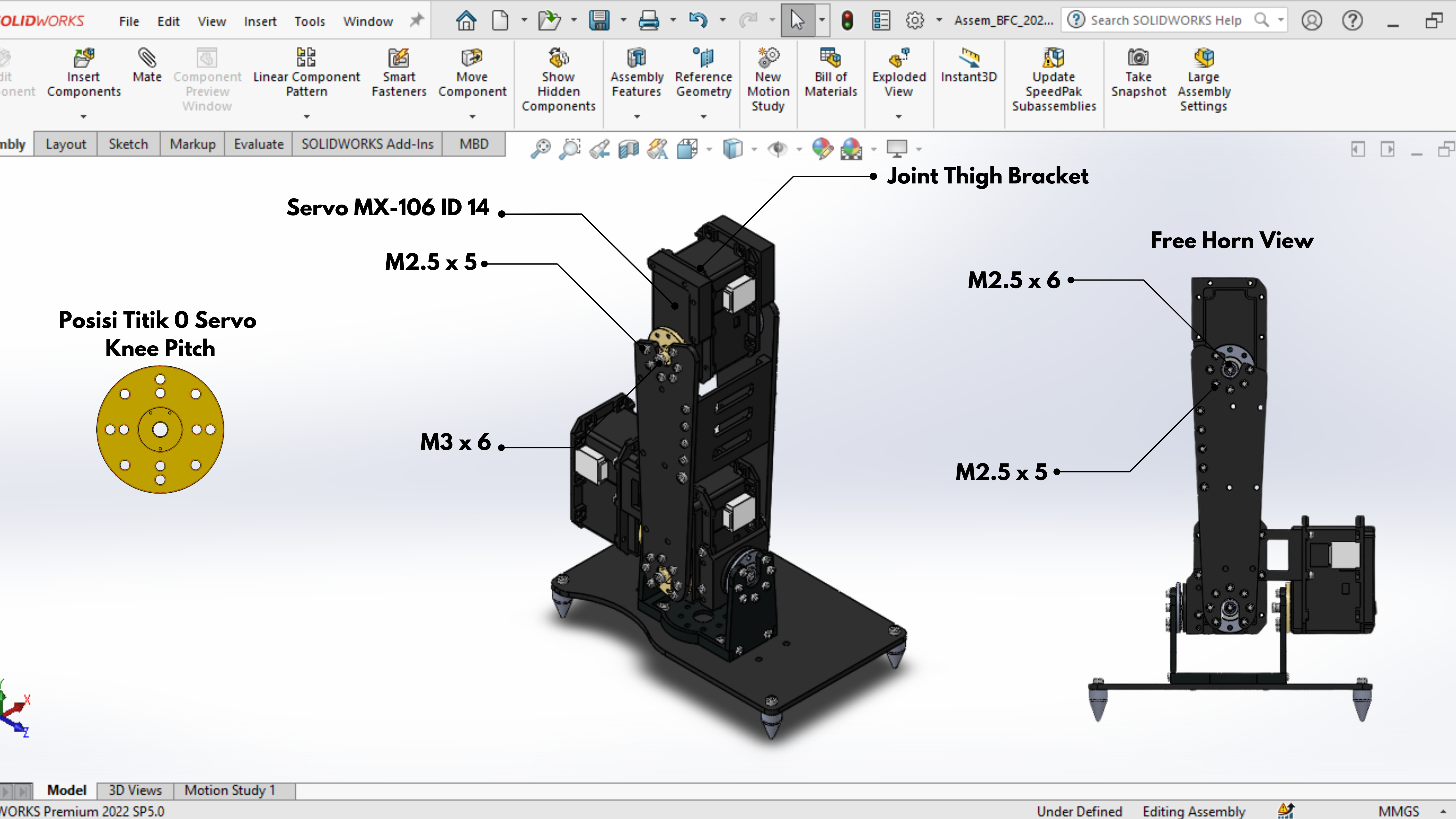
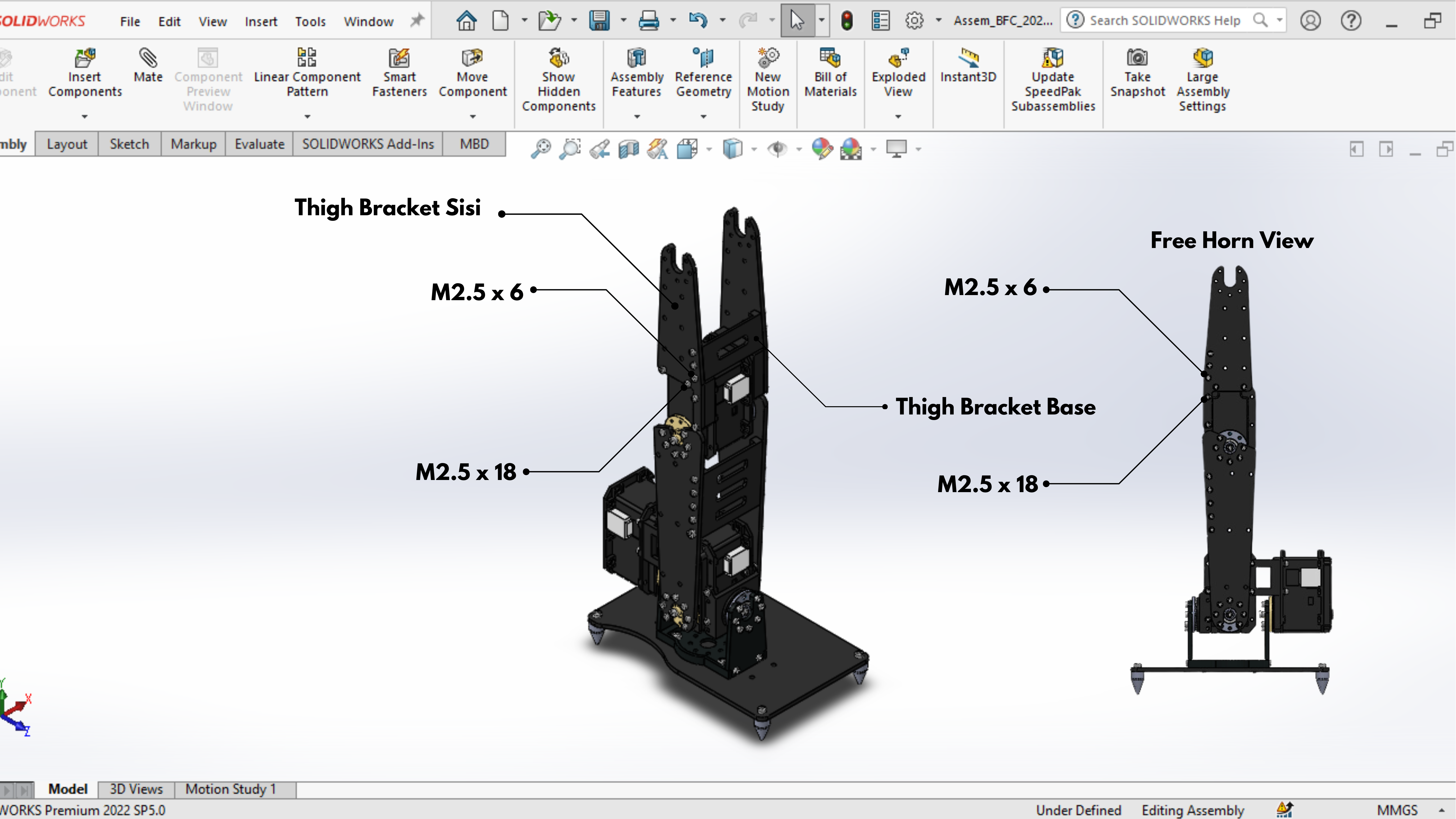
- selanjutnya siapkan 1 set Thigh Bracket Sisi dilengkapi dengan 1 set Join Bracket Sisi di pasang secara bergantian ke Servo MX-106T ID 14 menggunakan baut 8 pcs baut M2.5 x 18. setelah terpasang hubungkan kedua Thigh Bracket Sisi dengan part Thigh Bracket Base menggunakan baut M2.5 x 6 dilengkapi dengan Loctite Thread Lock.
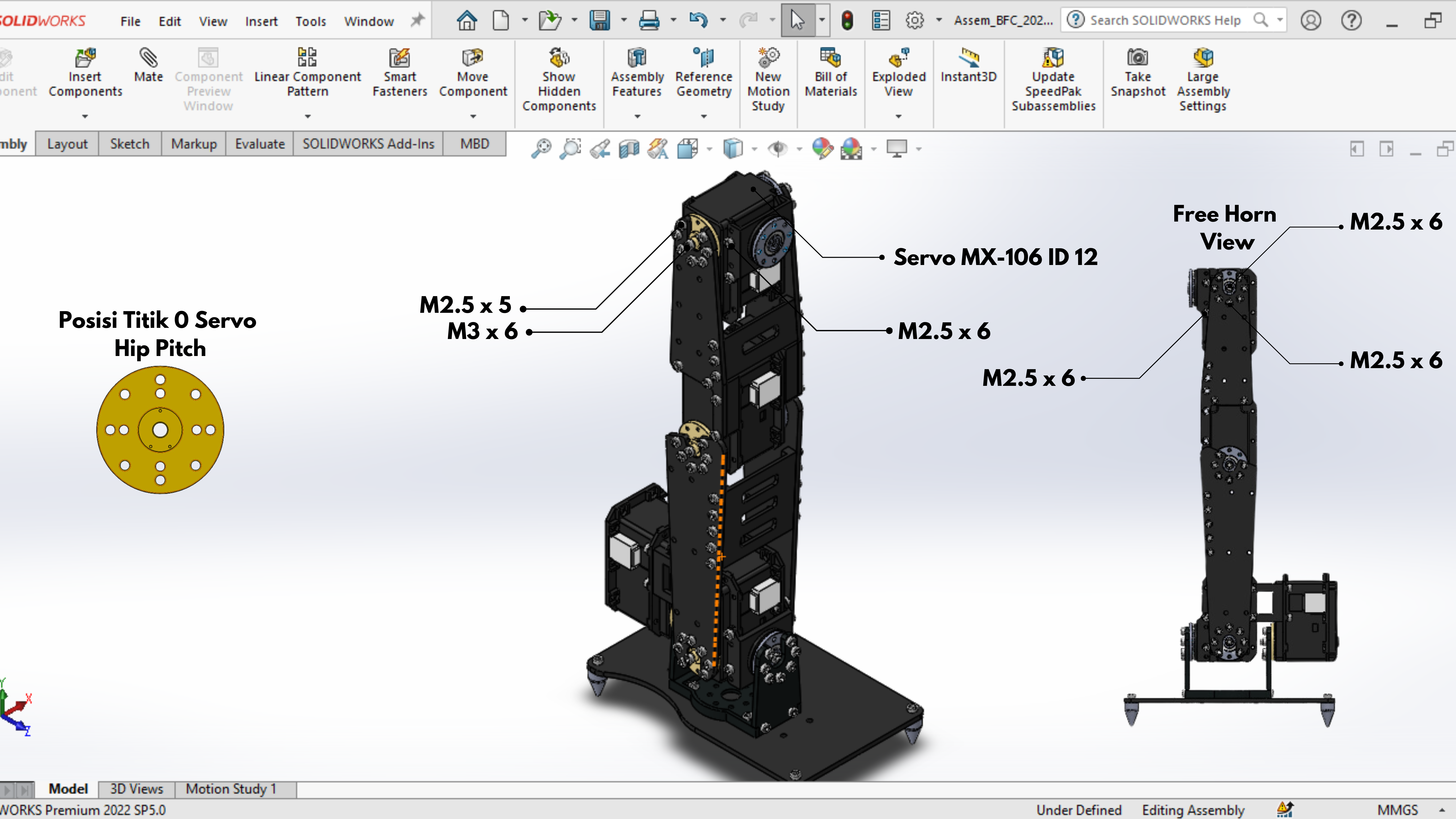
- siapkan servo MX-106T ID 12, pasangkan horn servo mengarah ke atas dan kencangkan menggunakan baut M3 x 6. kemudian lengkapi servo MX-106T ID 12 dengan part FR05-S101 menggunakan baut M2.5 x 6 dilengkapi dengan Nut M2.5. lalu hubungkan Horn servo MX-106T ID 12 dengan part Thigh Bracket Sisi menggunakan 14 pcs baut M2.5 x 5.
-
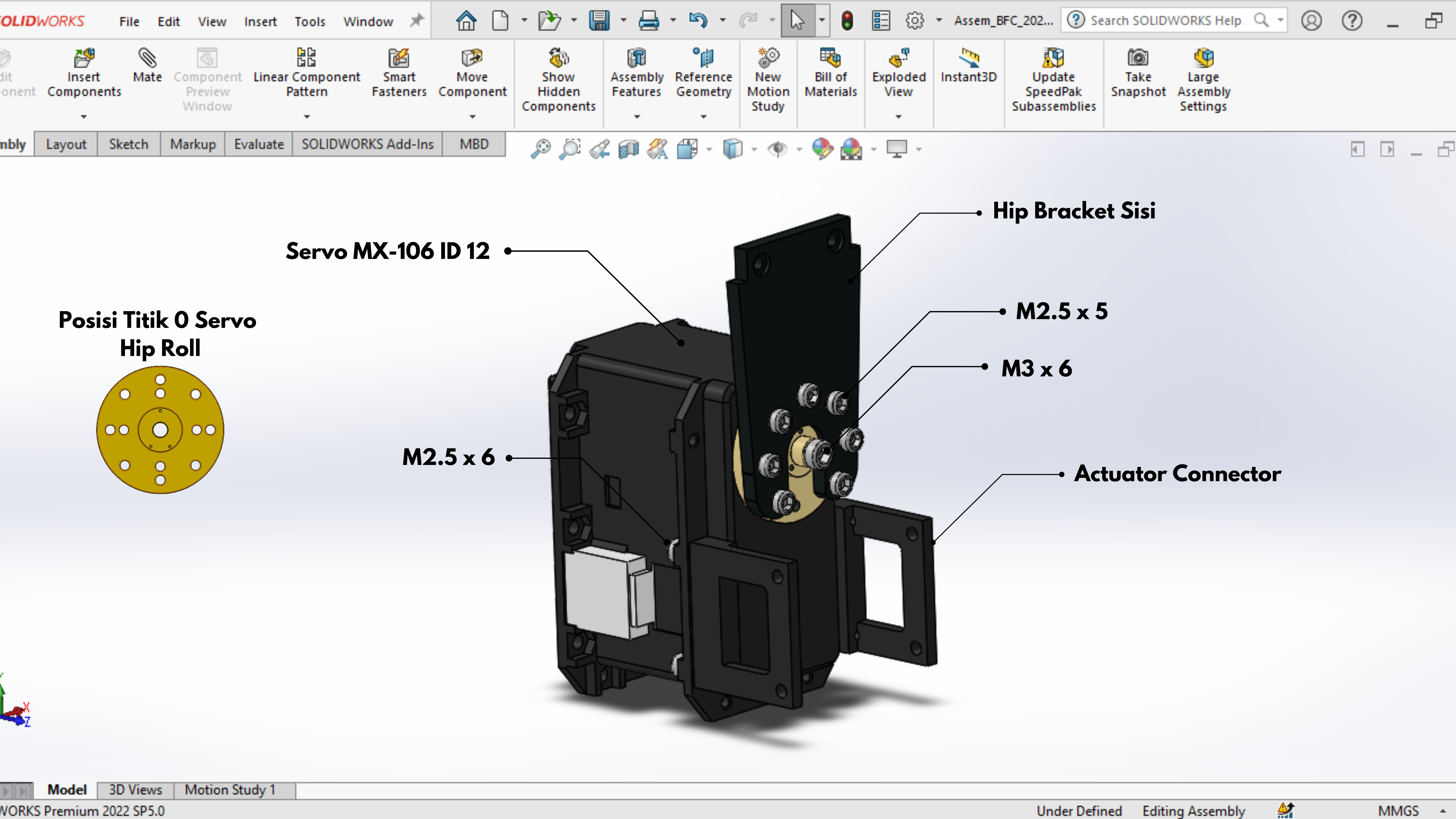
selanjutnya fokus merakit Servo MX-106T ID 10 dengan horn mengarah ke atas dan dikencangkan menggunakan baut M3 x 6. kemudian pada horn servo dihubungkan dengan part Hip Bracket menggunakan 7 baut M2.5 x 5 dan pada servo dilengkapi dengan 1 set Actuator Connector yang dihubungkan dengan baut M2.5 x 6.
-
setelah itu hubungkan Servo MX-106T ID 12 dengan Servo MX-106T ID 10 melalui Part Actuator Connector dan FR05-S101 menggunakan baut M2.5x6.
-
Hubungkan Hip Bracket dengan part FR05-S101 menggunakan baut M2.5 x 5 dan mengencangkan Free Horn pada FR05-S101 menggunakan baut M2.5 x 6.
-
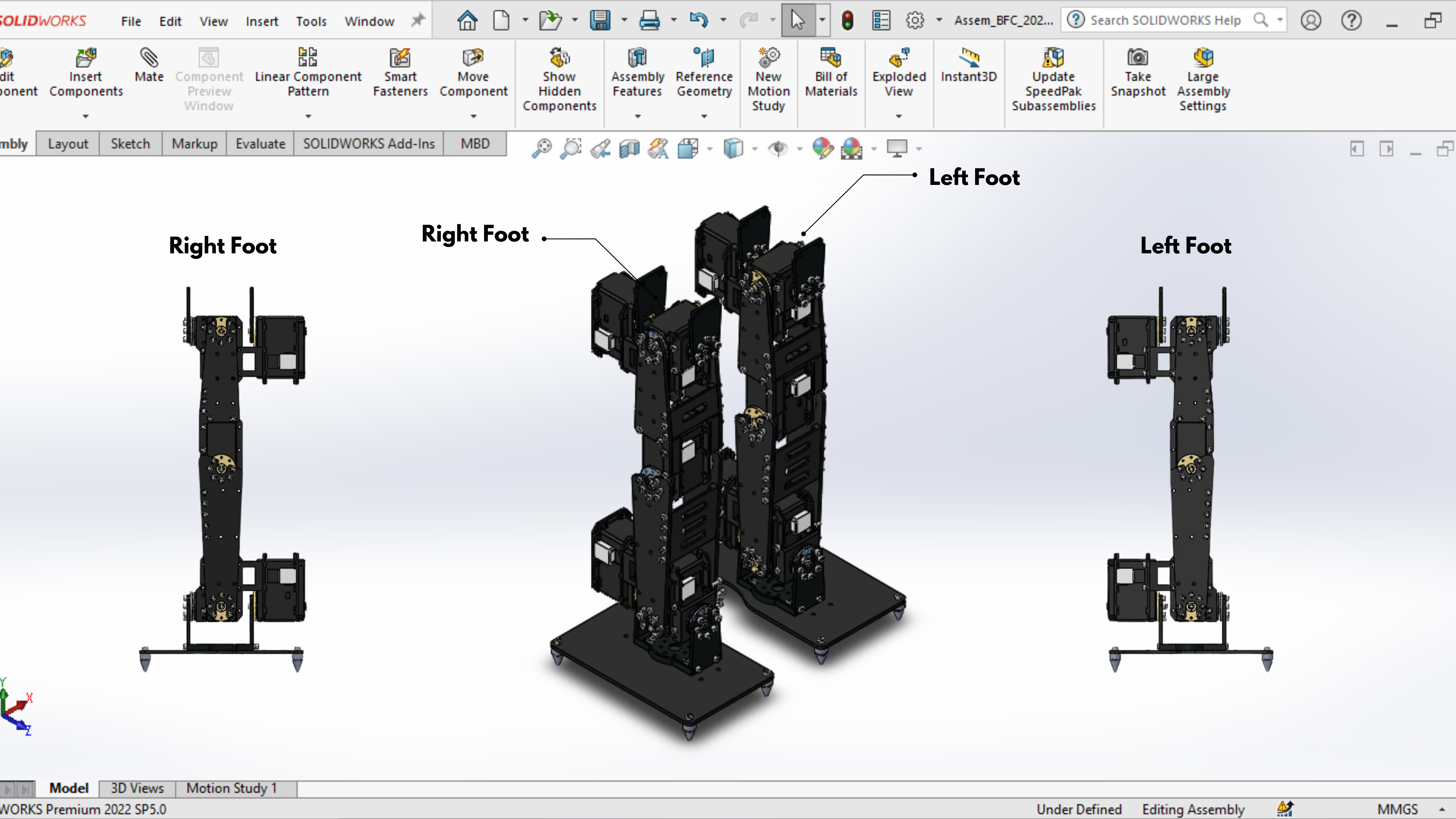
setelah kaki kiri selesai dirakit, ulangi hal yang sama untuk merakit kaki kanan robot, perhatikan ID yang sudah tertera urutannya dan arah titik nol horn servo yang sudah disebutkan pada langkah langkah tersebut.
3. Assembly Body Robot
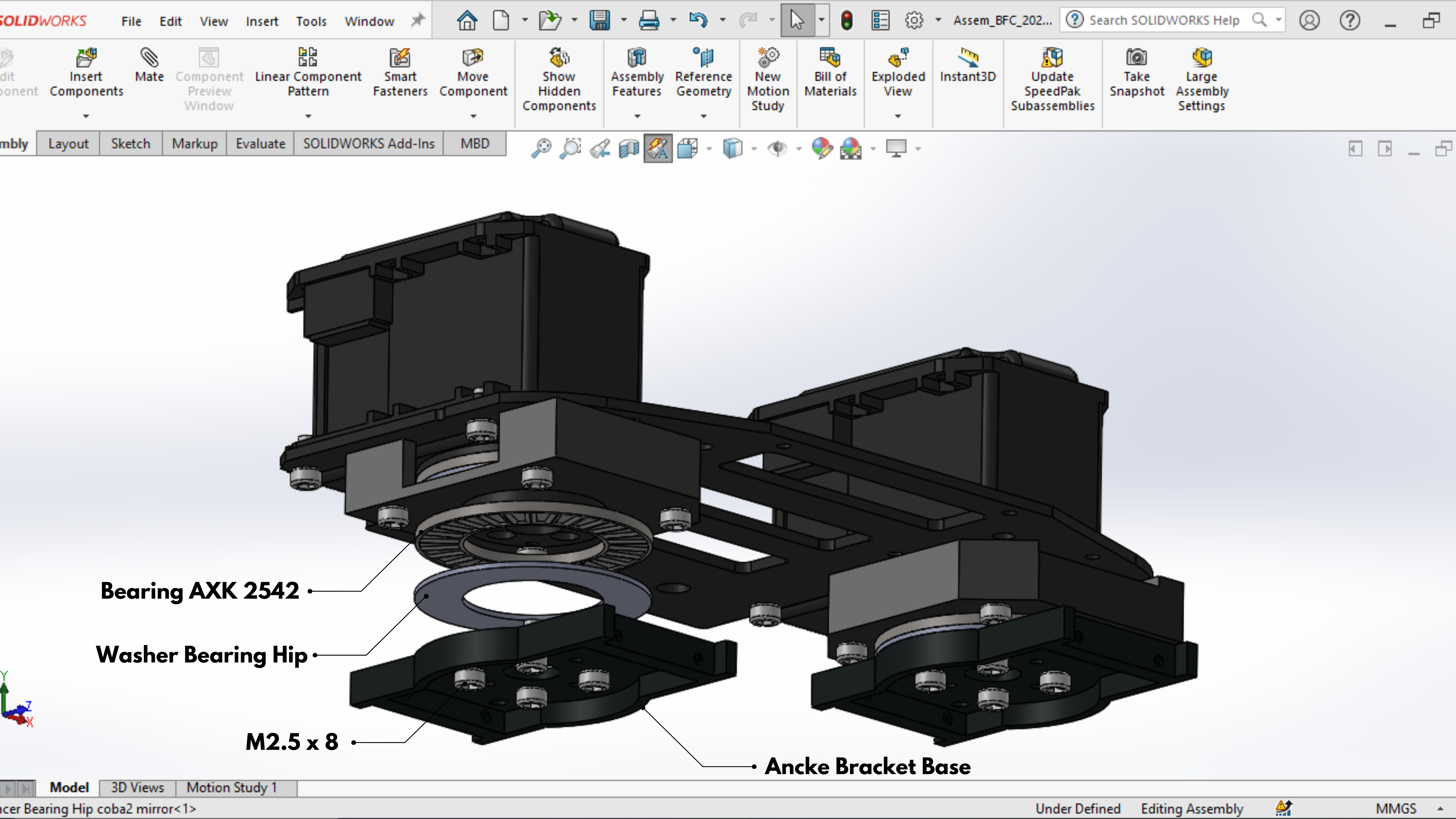
- Pertama, Hubungkan Base Battery dengan motor servo MX-64 ID 7 & 8 menggunakan 8 pcs baut M2.5 x 8.
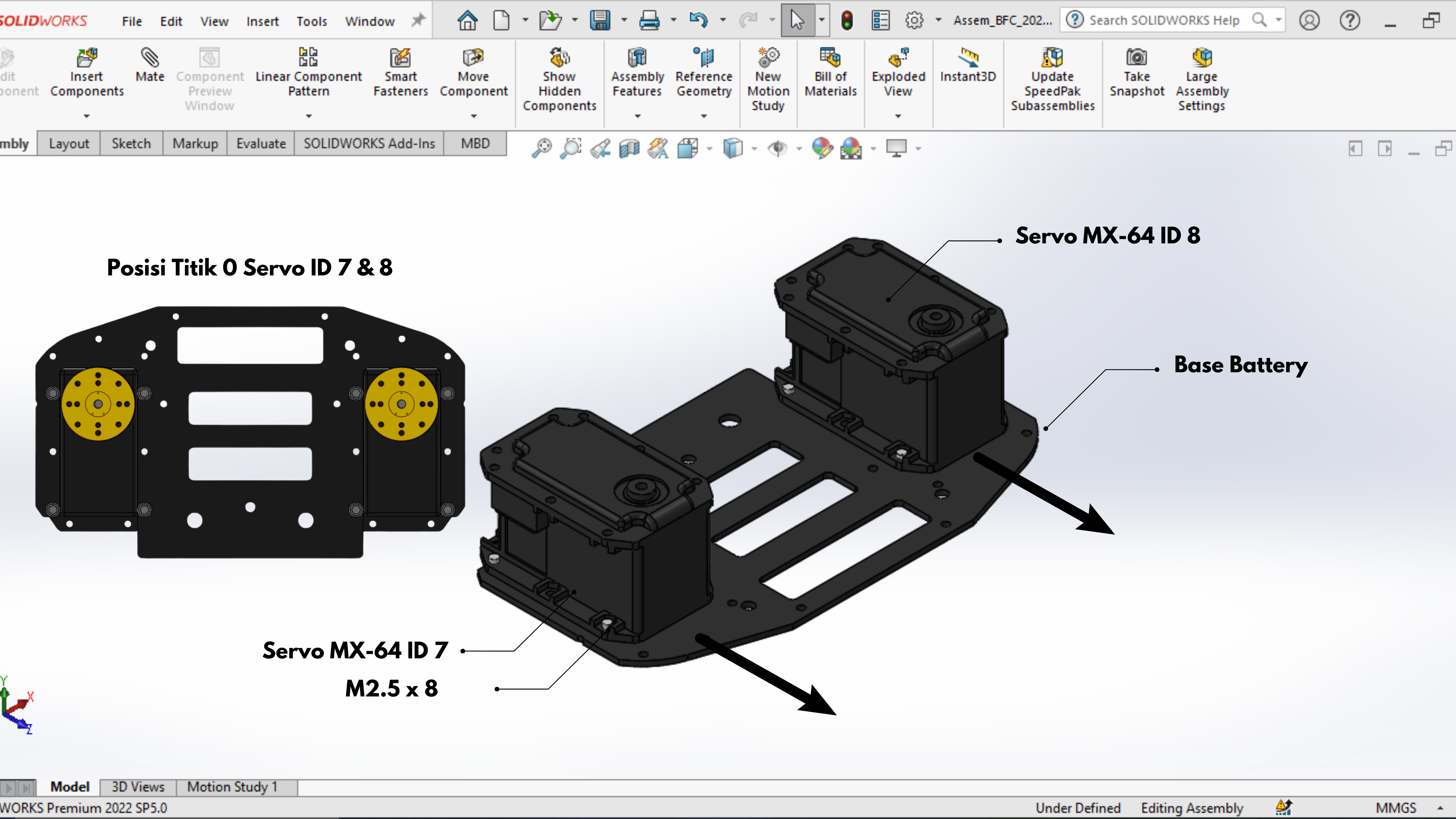
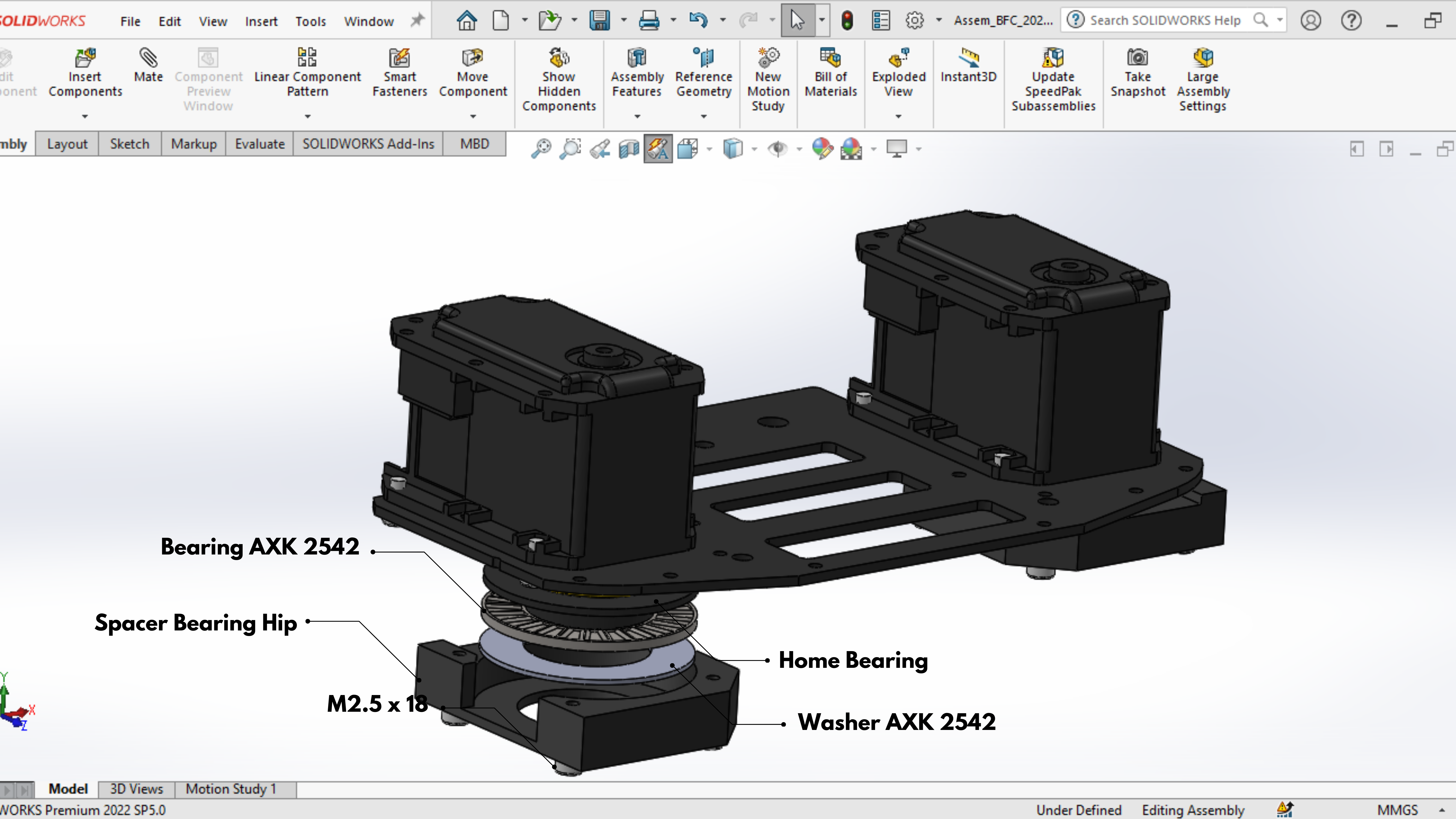
- Kemudian, Hubungkan kedua horn motor servo dengan urutan seperti di gambar, Home Bearing Ke Servo menggunakan 4 pcs baut M2.5 x 6, KemudianBearing AXK2542 dan Washer AXK 2542 untuk mengisi Gap dengan Spacer Bearing Hip, Kemudian kunci dengan 4 pcs baut M2.5 x 18 dan Locknut M2.5 .
- Hubungkan Home Bearing dengan Ancle bracket Base menggunakan 4 pcs baut M2.5 x 8. berikan Bearing AXK 2542 & Washer AXK 2542 untuk mengisi Gap tersebut.
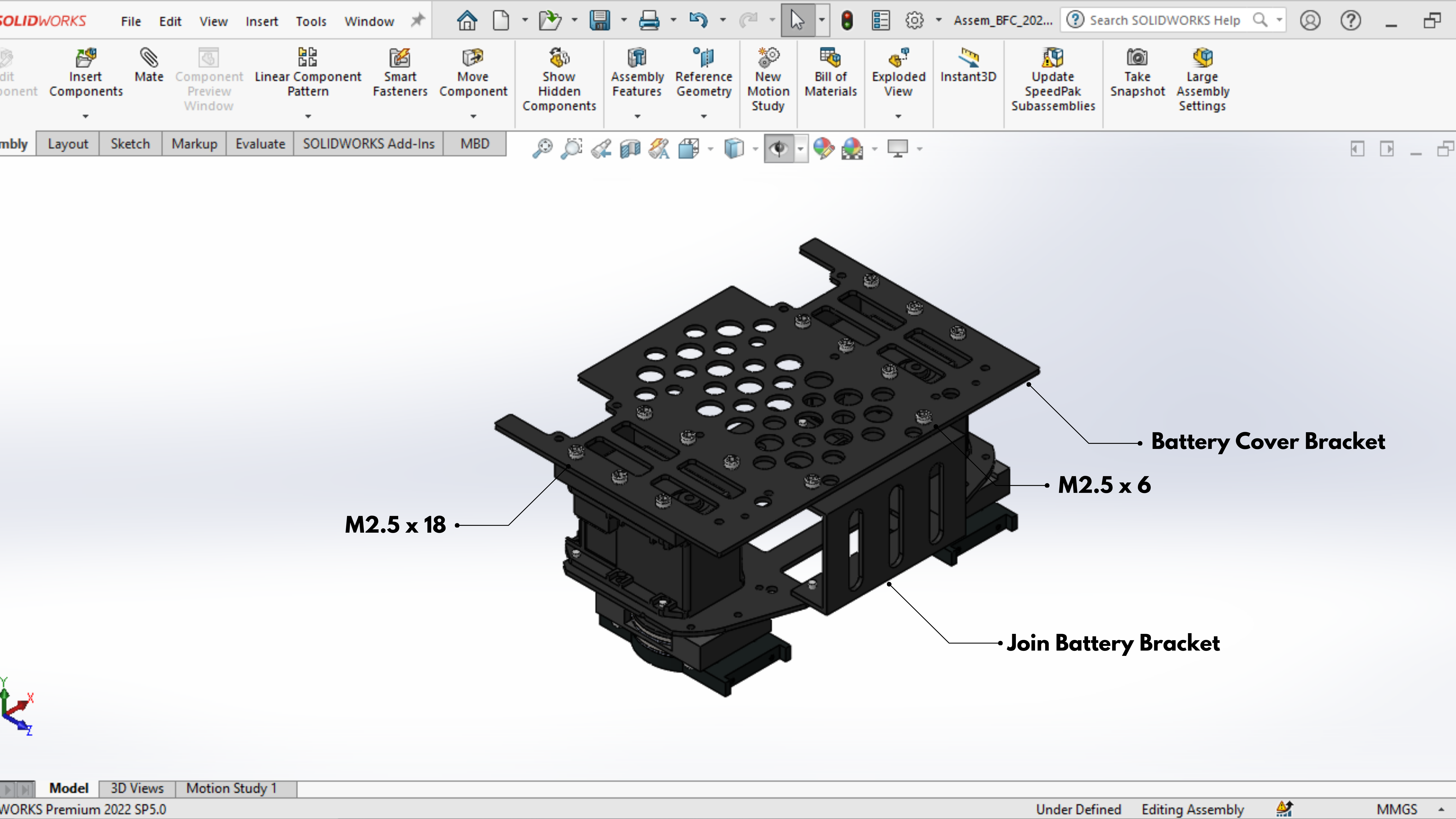
- Selanjutnya, Pasang Battery Cover Bracket dengan Hip Join MX 64 ke motor servo ID 7 & 8 menggunakan 12 pcs baut M2.5 x 18. pada bagian depan hubungkan Join Battery Bracket menggunakan 4 pcs baut M2.5 x 6 untuk menutupi bagian depan tempat battery.
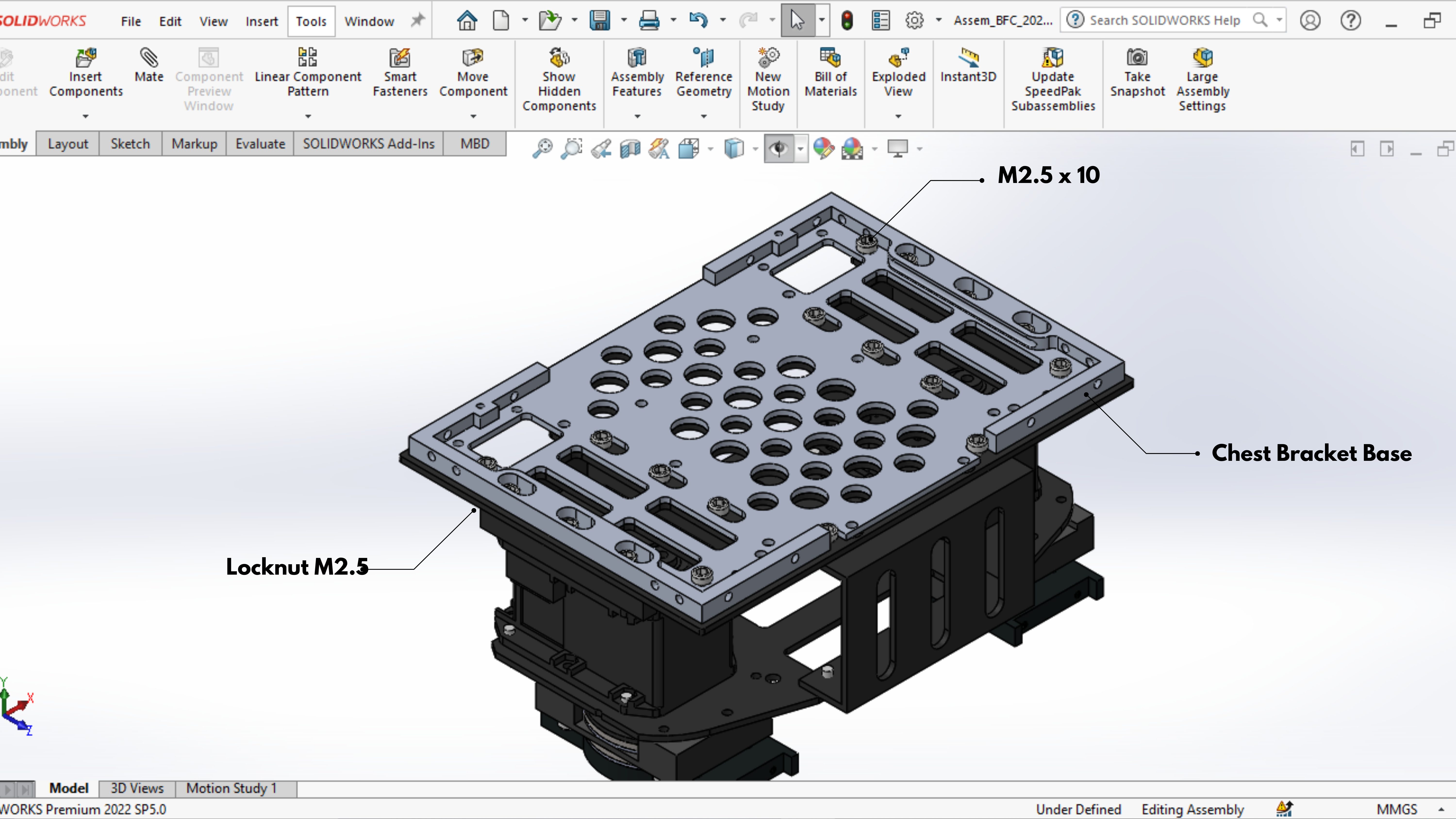
- Kemudian berikan Chest Bracket Base pada permukaan battery cover bracket dengan menggunakan 4 pcs baut M2.5 x 10 & Locknut M2.5.
- Pasang Home Base Jetson Xavier NX ke Chest Bracket Base Menggunakan 4 pcs baut M2.5 x 6.
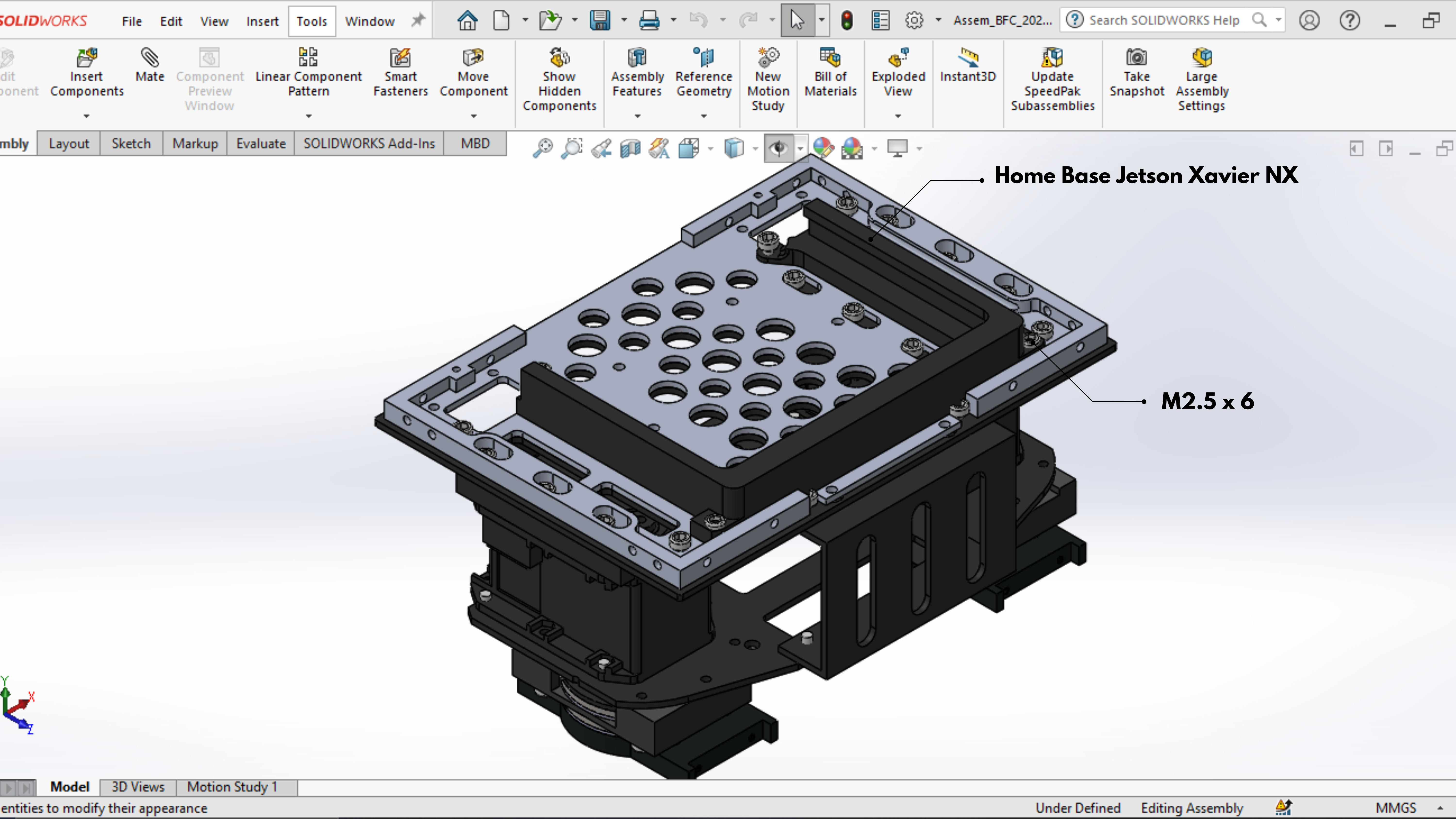
- Kemudian di area belakang pasangkan bagian Back Switch Ke Chest Bracket Base Menggunakan 2 pcs baut M2.5 x 6.
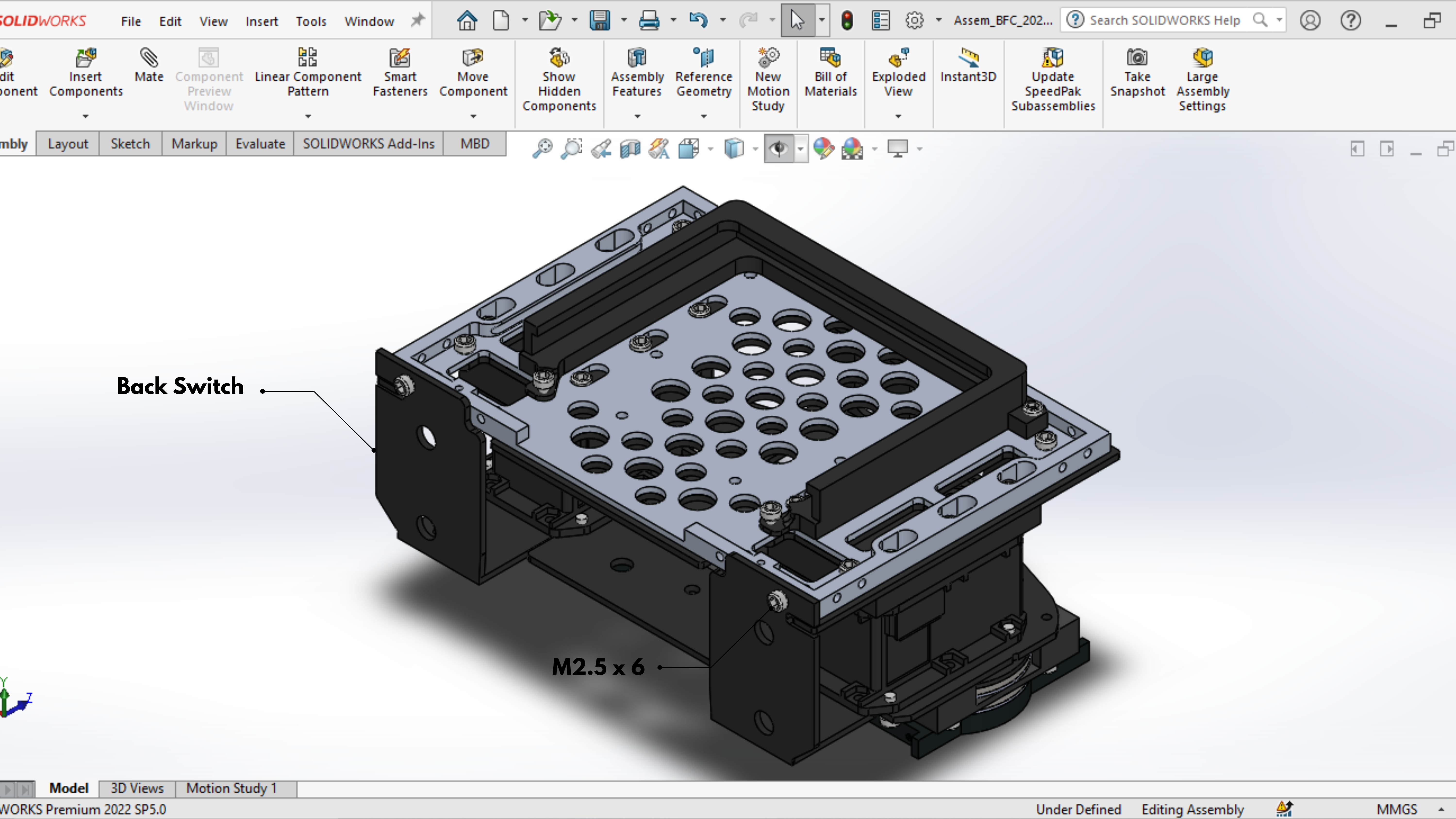
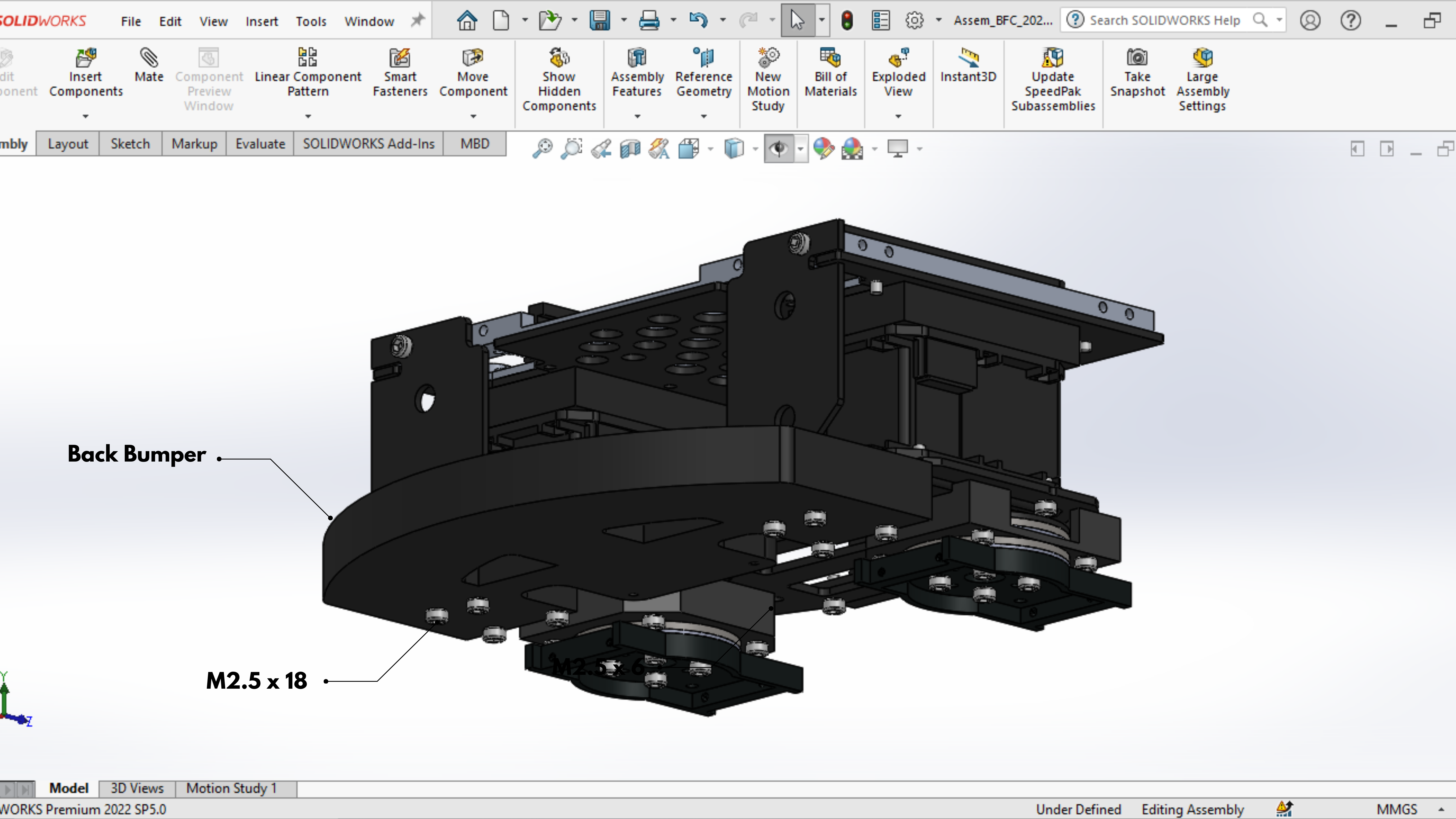
- kemudian hubungkan Back Bumper dengan Back Switch yang terhubung dengan motor Servo ID 7 & 8 menggunakan 8 pcs baut M2.5 x 18.
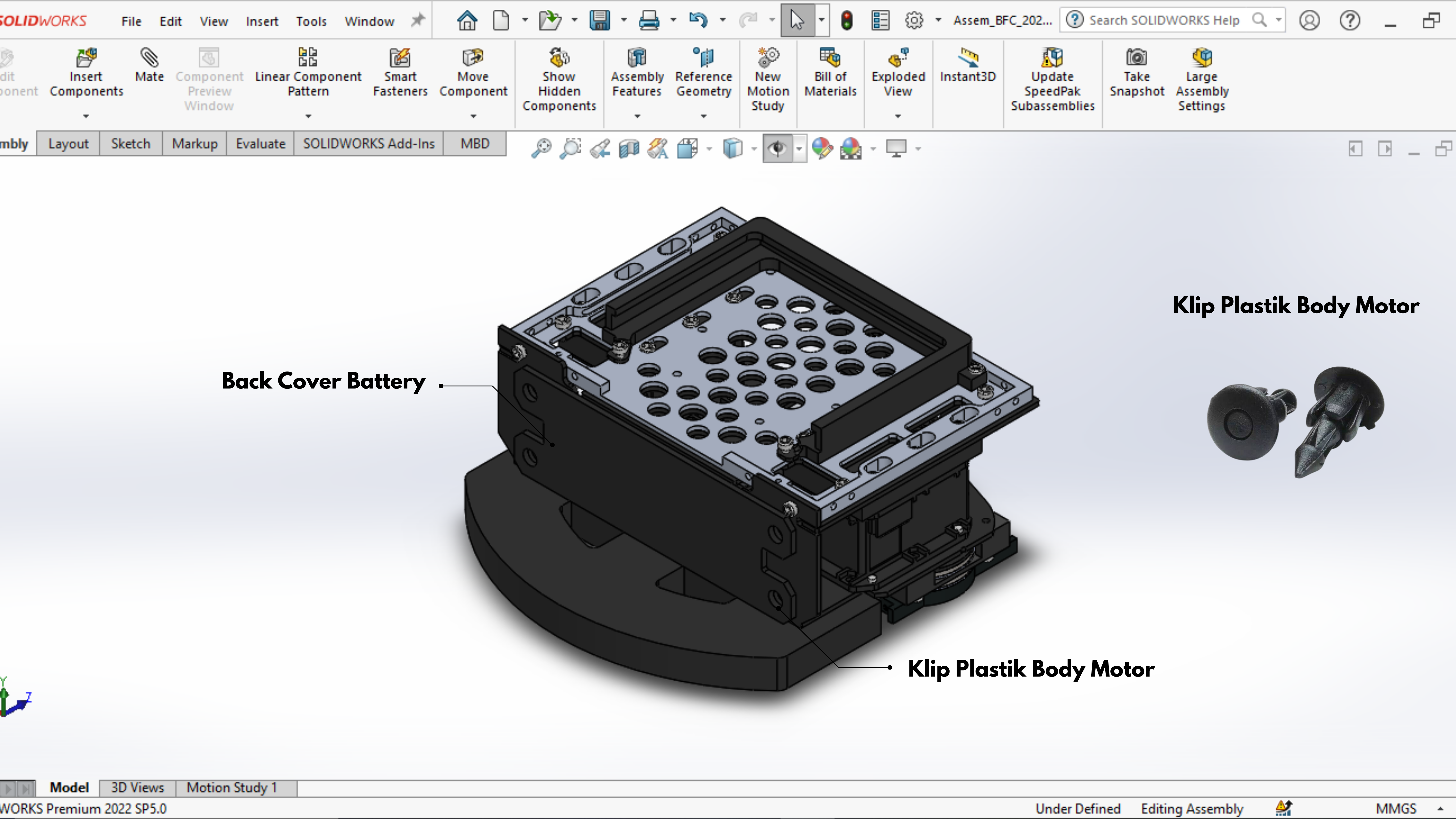
- Selanjutnya, untuk menutup tempat battery. pasangkan bagian Back Cover Battery ke bagian Back Switch menggunakan 4 pcs Klip Plastik Body Motor.
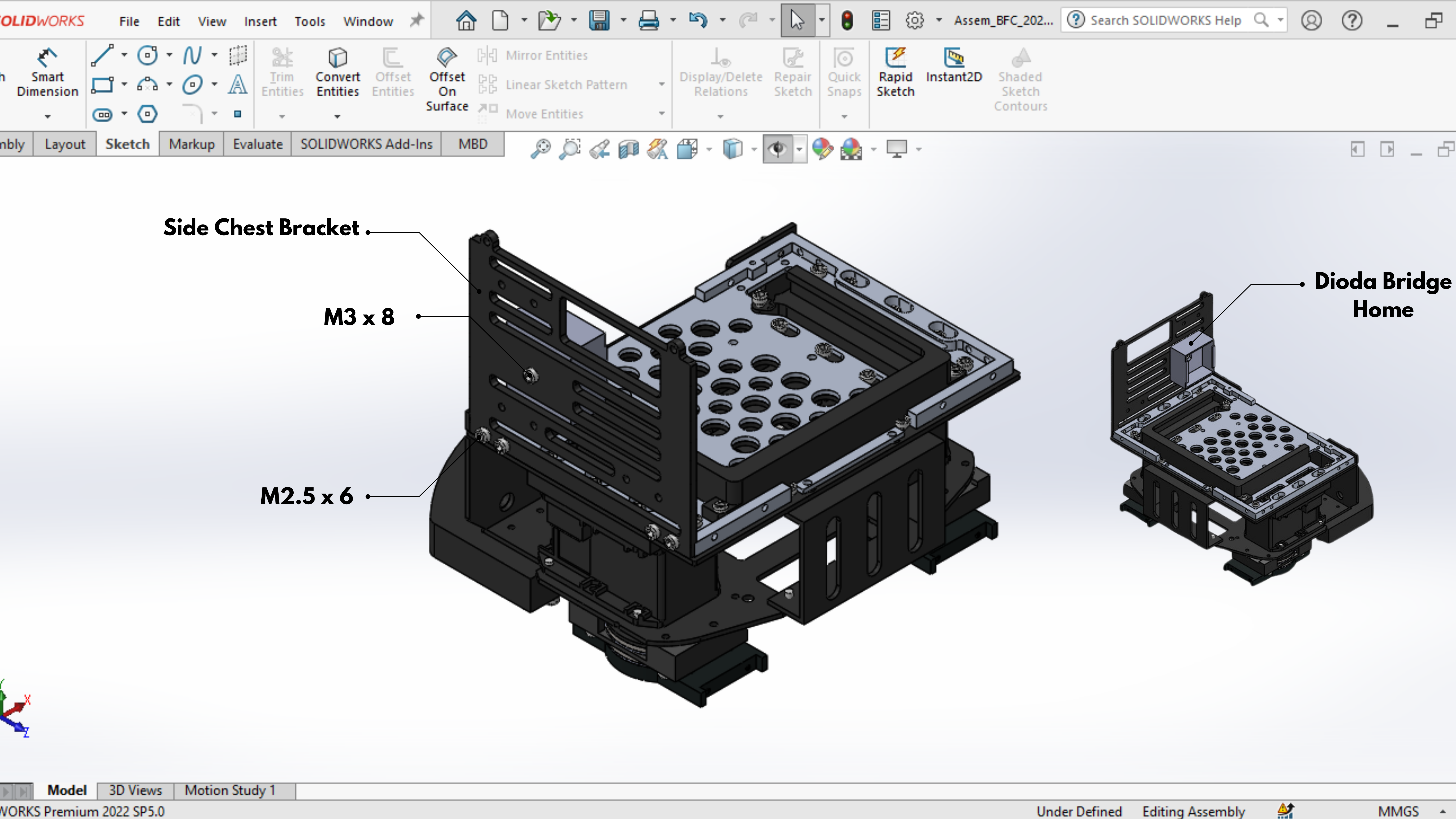
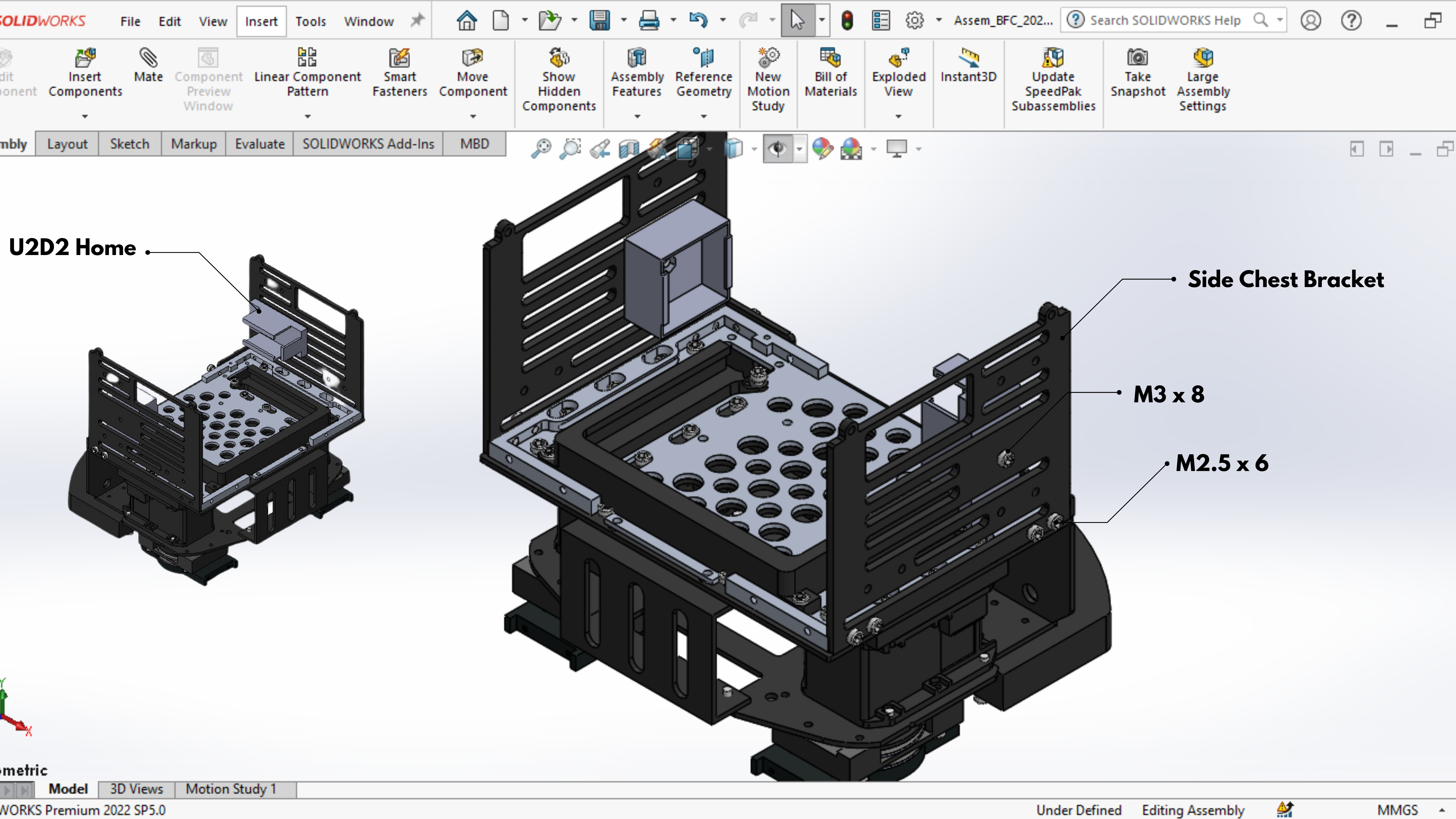
- selanjutnya pada bagian samping body, pasangkan Side Chest Bracket ke Chest Bracket Base menggunakan 4 pcs baut M2.5 x 6. pada bagian side chest bracket pasangkan Dioda Bridge Home menggunakan Baut M3 x 8.
- Pada sisi lain, lakukan hal yang sama. gantikan posisi dioda bridge home dengan bagian U2D2 Home pada sisi Side Chest Bracket.
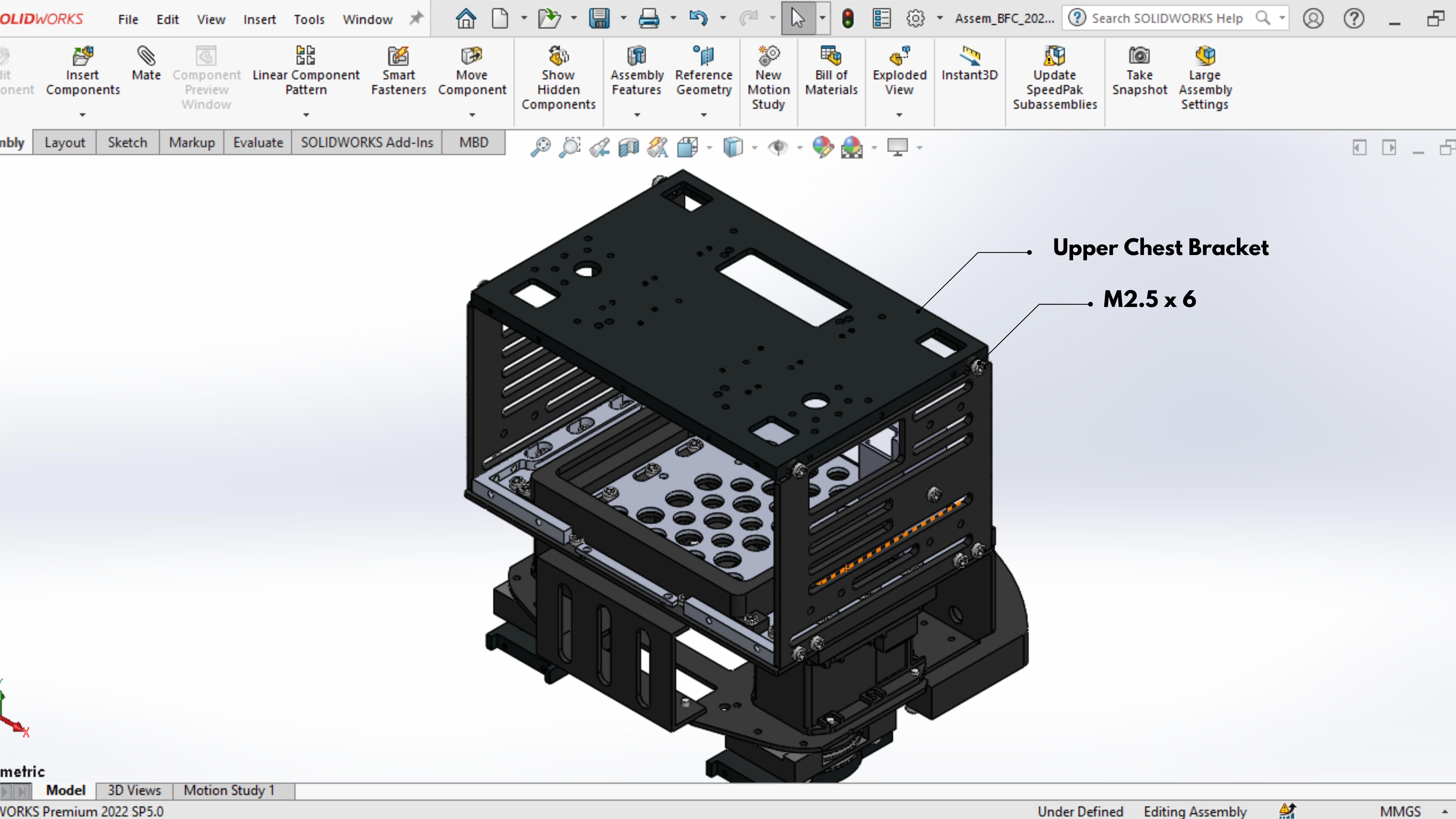
- setelah itu pada kedua bagian side chest bracket hubungkan dengan Upper Chest Bracket dengan 4 pcs baut M2.5 x 6.
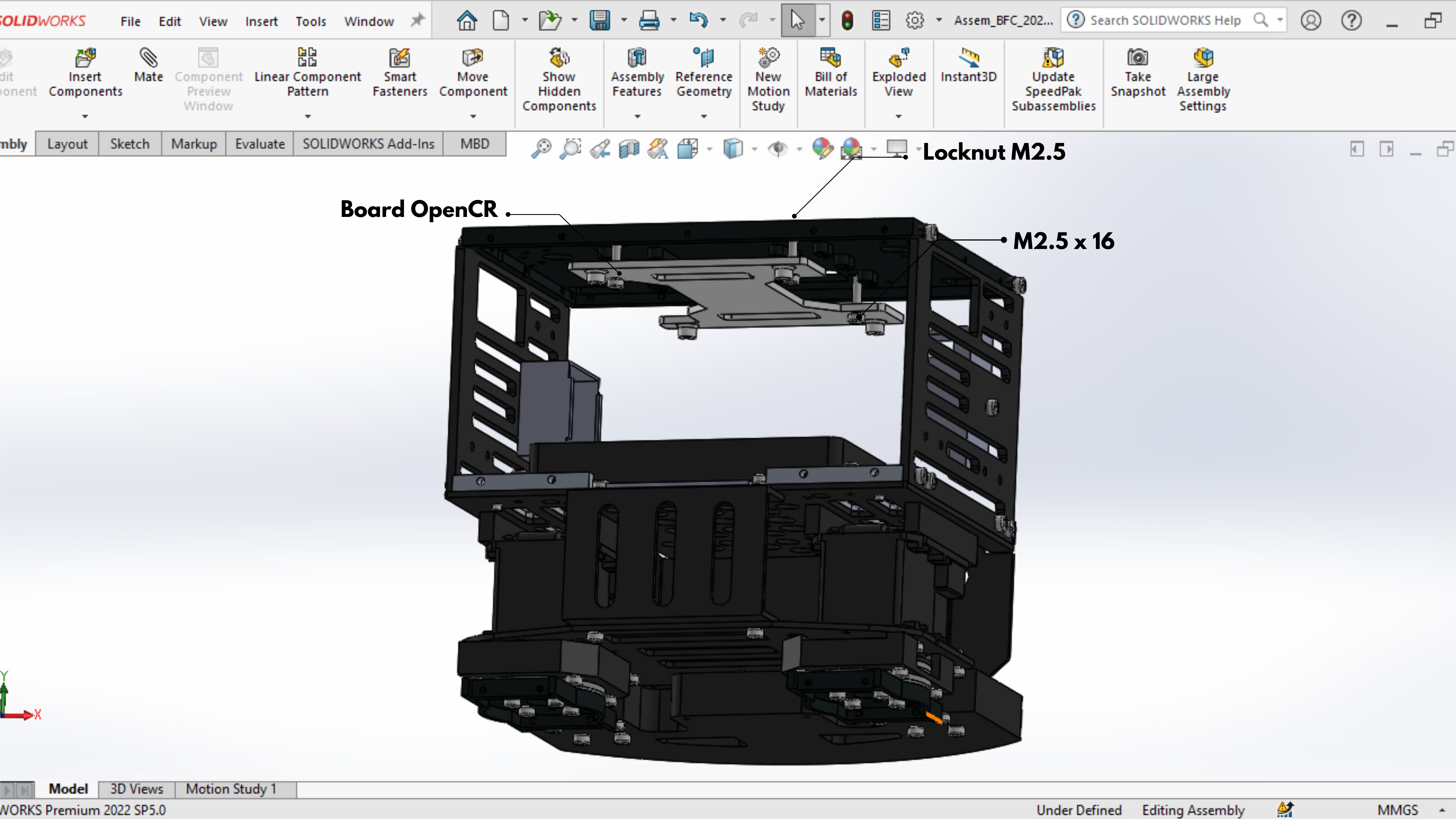
- Kemudian selanjutnya pada bagian dalam body robot, hubungkan Board OpenCR dengan bagian Upper Chest Bracket dengan Menggunakan 3 pcs baut M2.5 x 16 & Locknut.
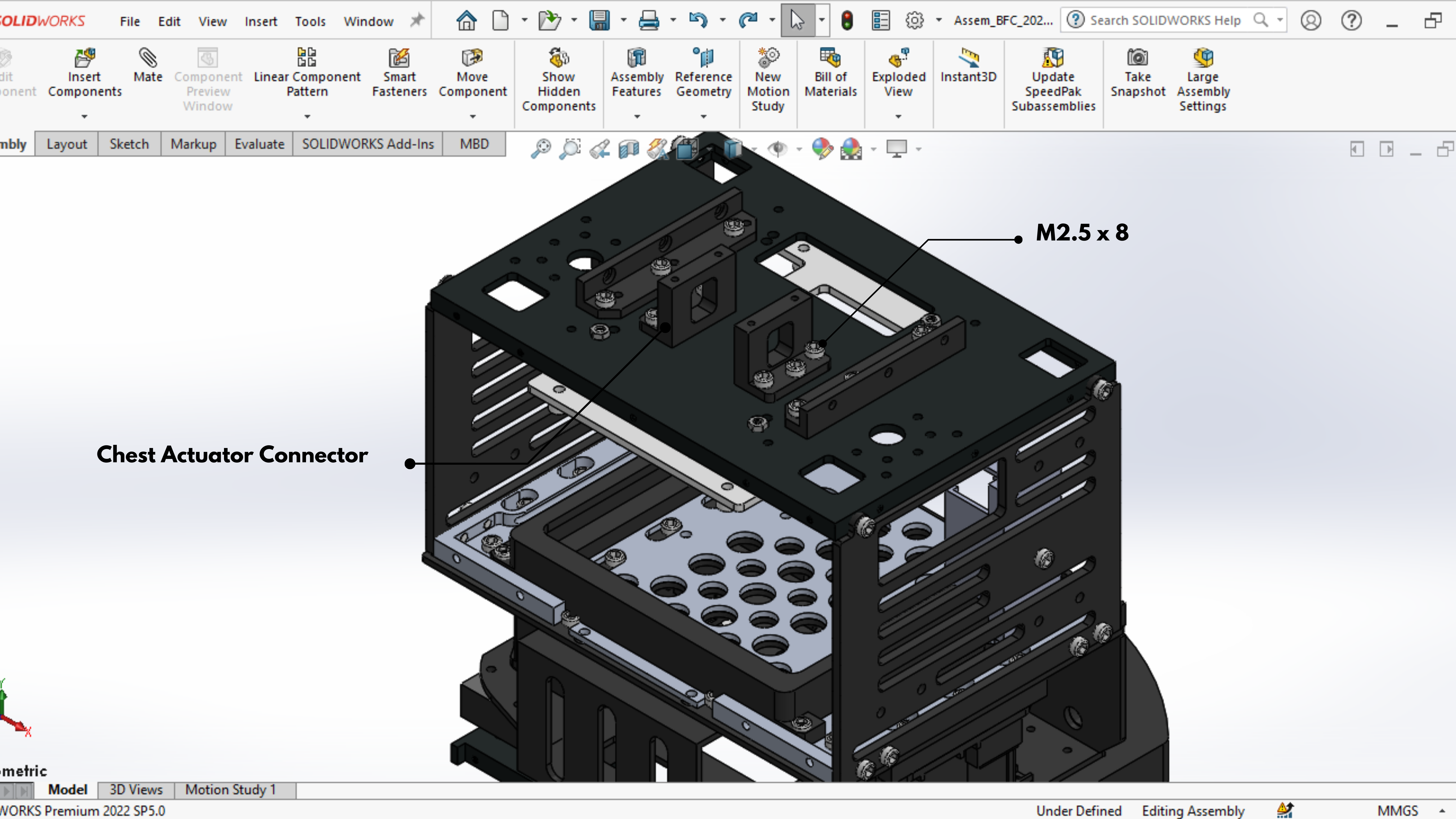
- Pada bagian atas upper chest bracket berikan sepasang Angled Actuator Servo Holder pada sisi kanan dan kiri menggunakan 6 pcs baut M2.5 x 8.
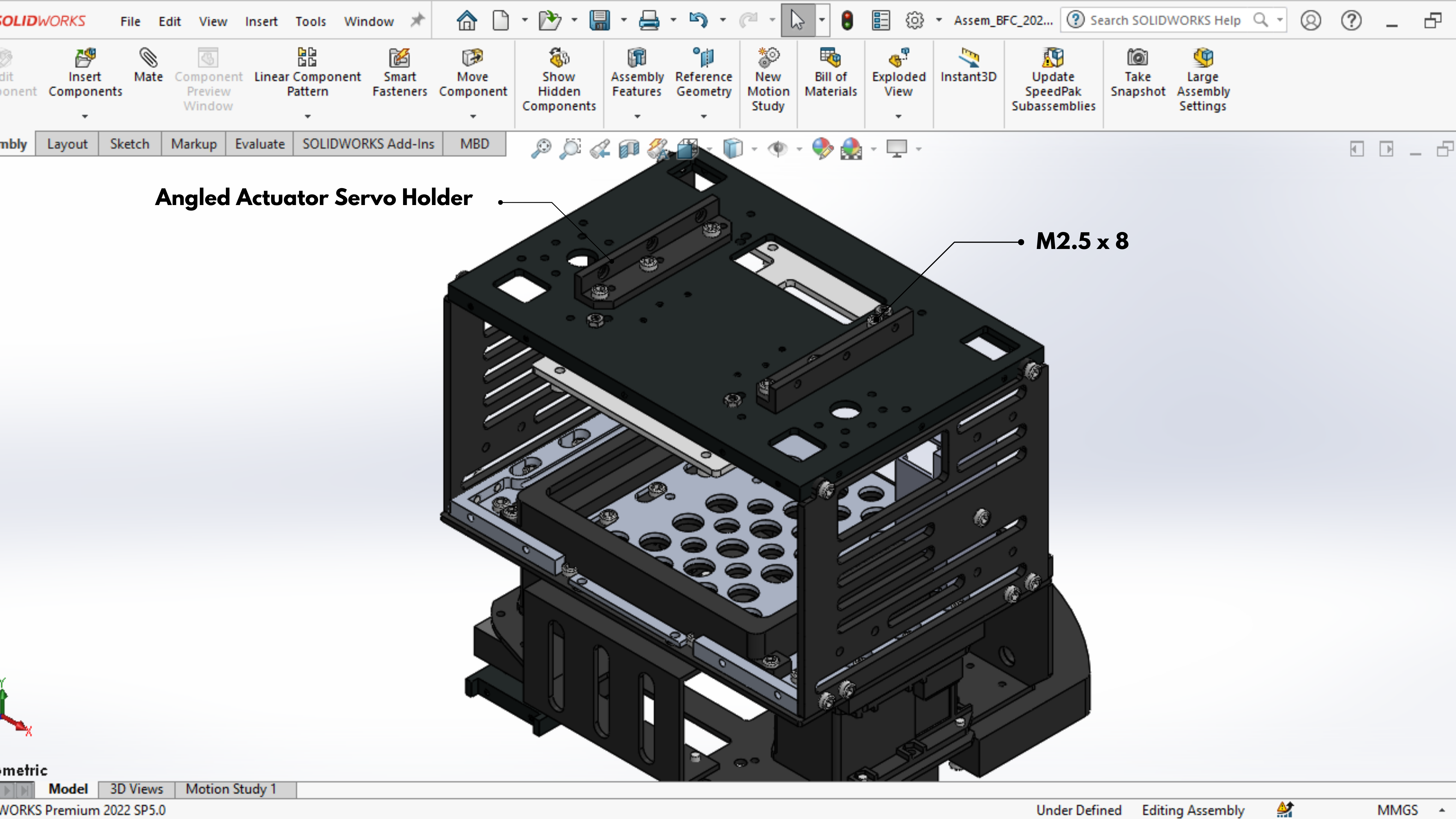
- selanjutnya pasangkan bagian Chest Actuator Connector ke upper chest bracket menggunakan 6 pcs baut M2.5 x 8.
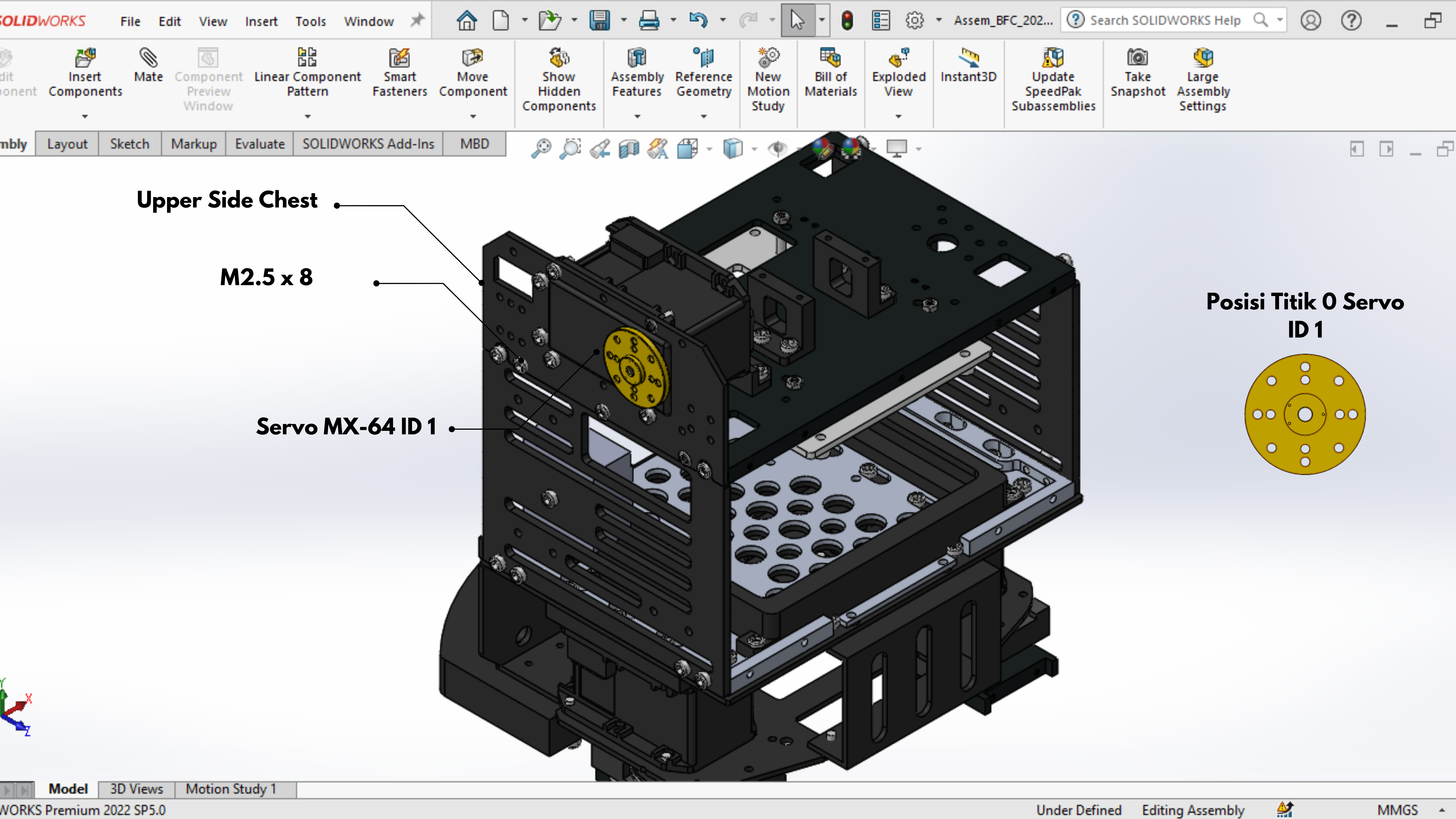
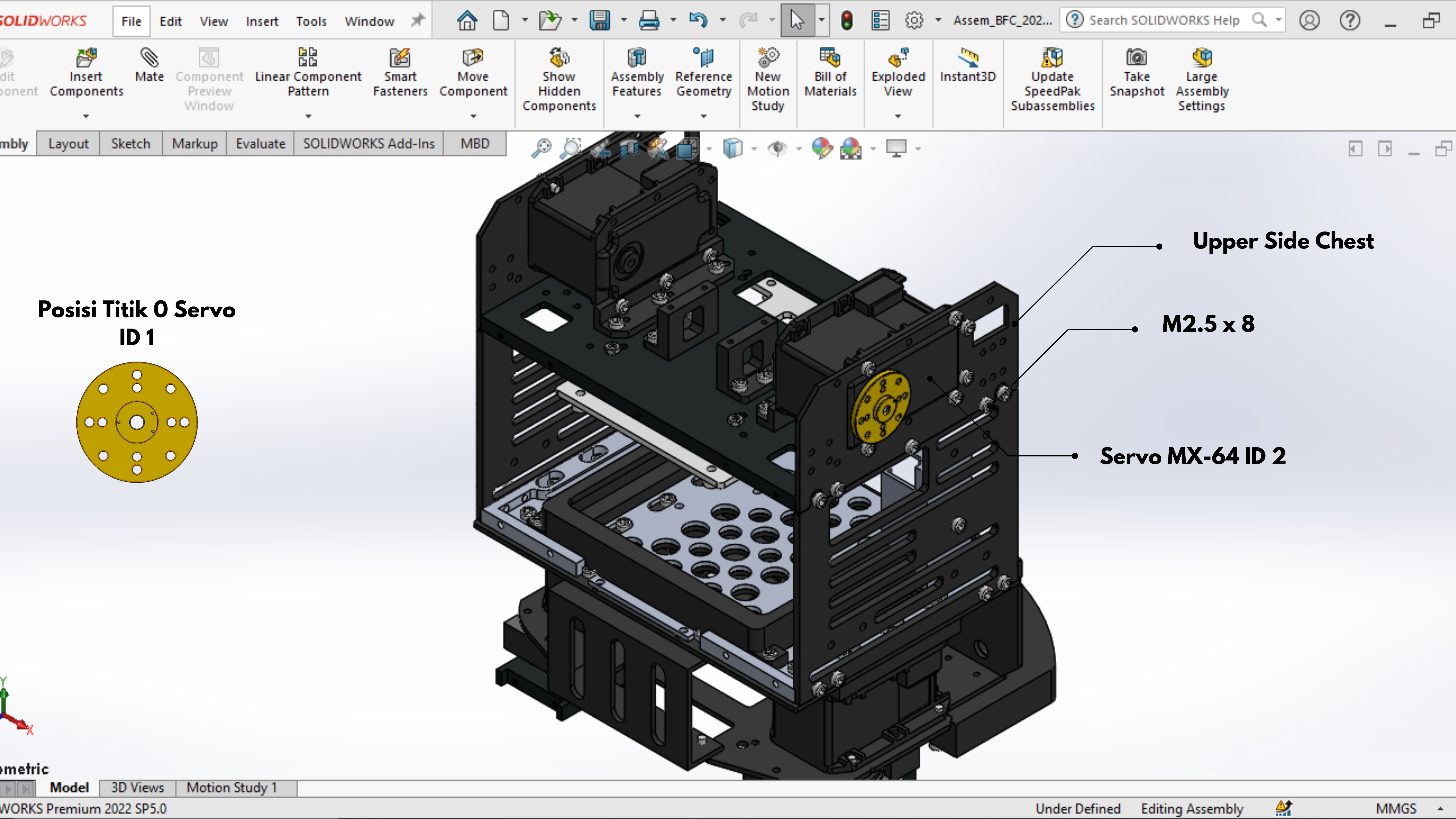
- selanjutnya pasangkan Servo ID 1 pada sisi kanan yang dihubungkan dengan Angled Actuator Connector menggunakan 3 pcs Baut M2.5 x 8. lengkapi pada bagian sisi servo dengan bagian Upper side Chest dihubungkan menggunakan 9 pcs baut M2.5 x 8
- Lakukan hal yang sama pada sisi kiri menggunakan servo MX-64 ID 2.
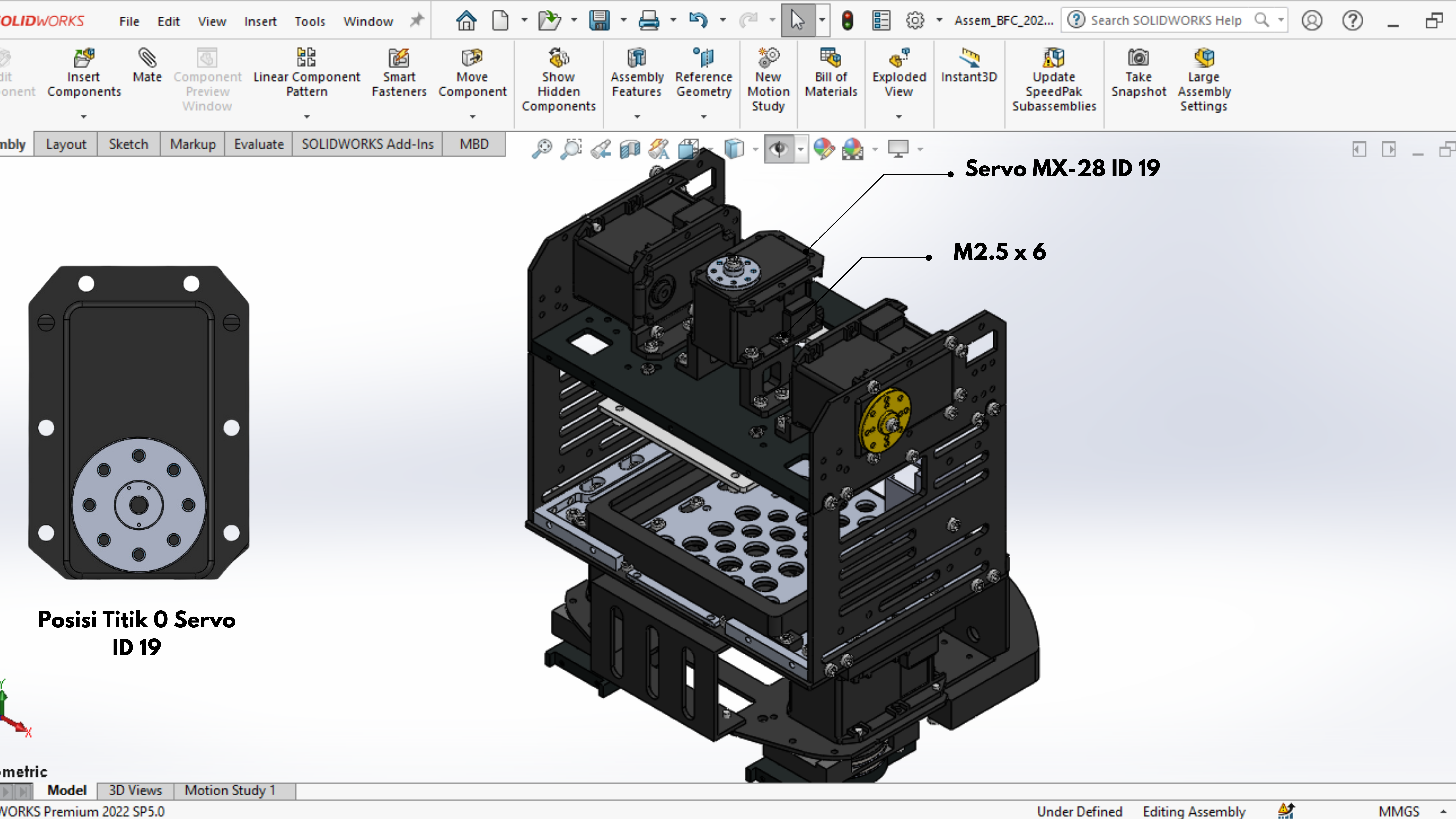
- selanjutnya pasang motor servo MX-28 ID 19 dengan Chest Actuator Connector menggunakan 4 pcs baut M2.5 x 6
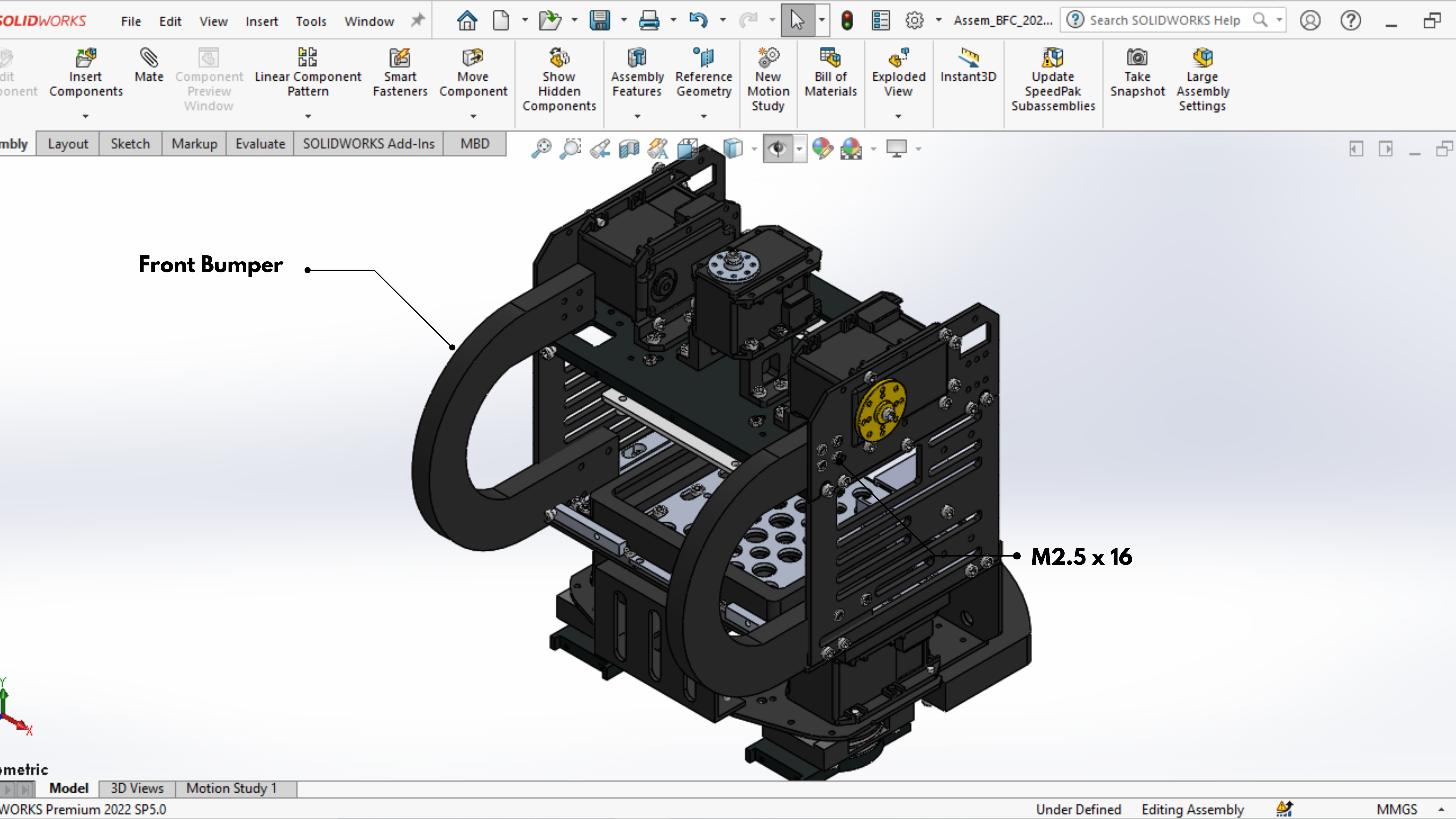
- pada bagian depan, pasangkan part Front Bumper dengan Upper Side Chest bagian dalam dan Side Chest Bracket bagian luar menggunakan 8 pcs Baut M2.5 x 16.
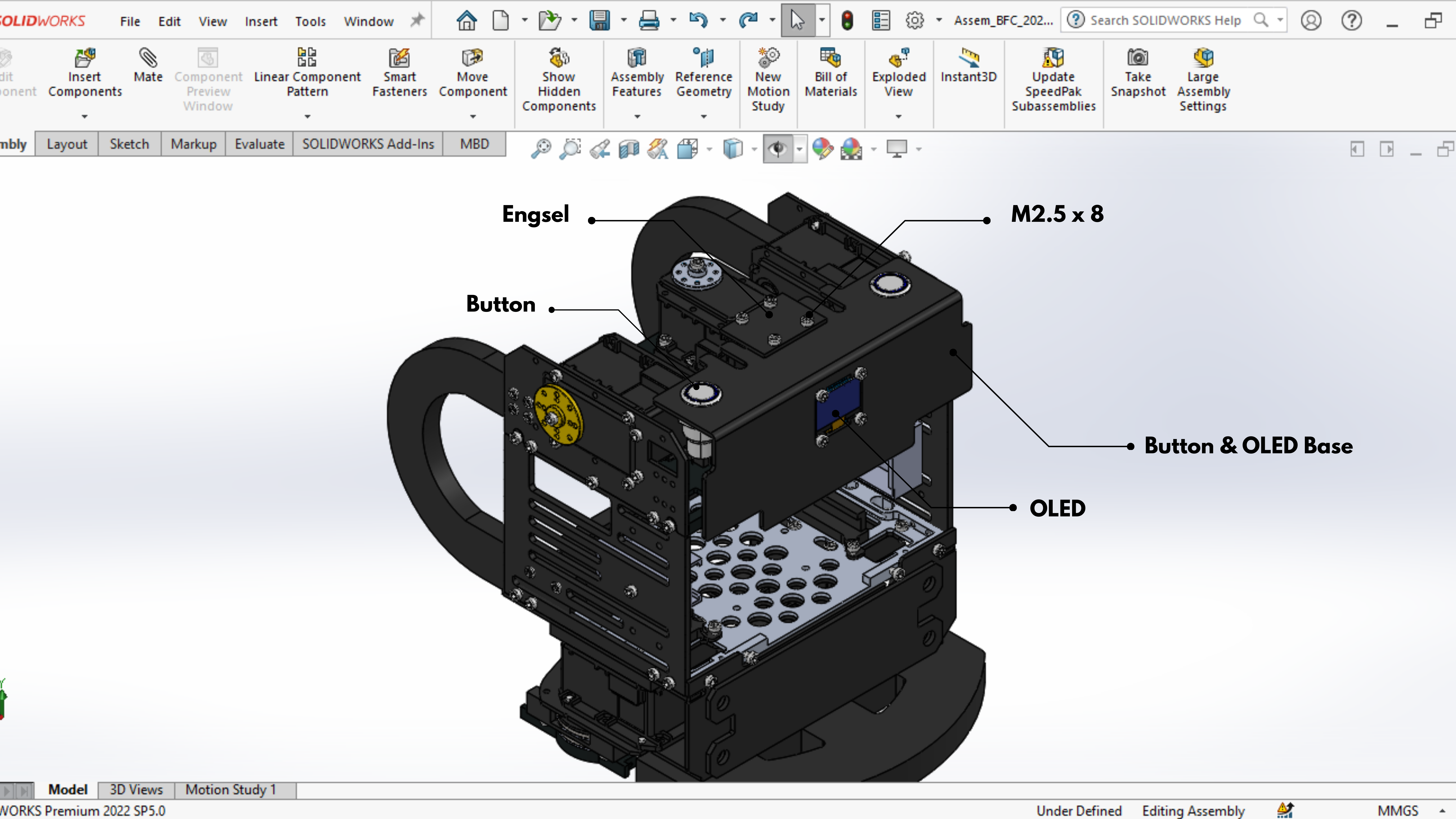
- selanjutnya, hubungkan Button & Oled Base ke motor Servo MX-28 ID 19 dengan menggunakan Engsel dan 4 pcs baut M2.5 x 8 dan Locknut.
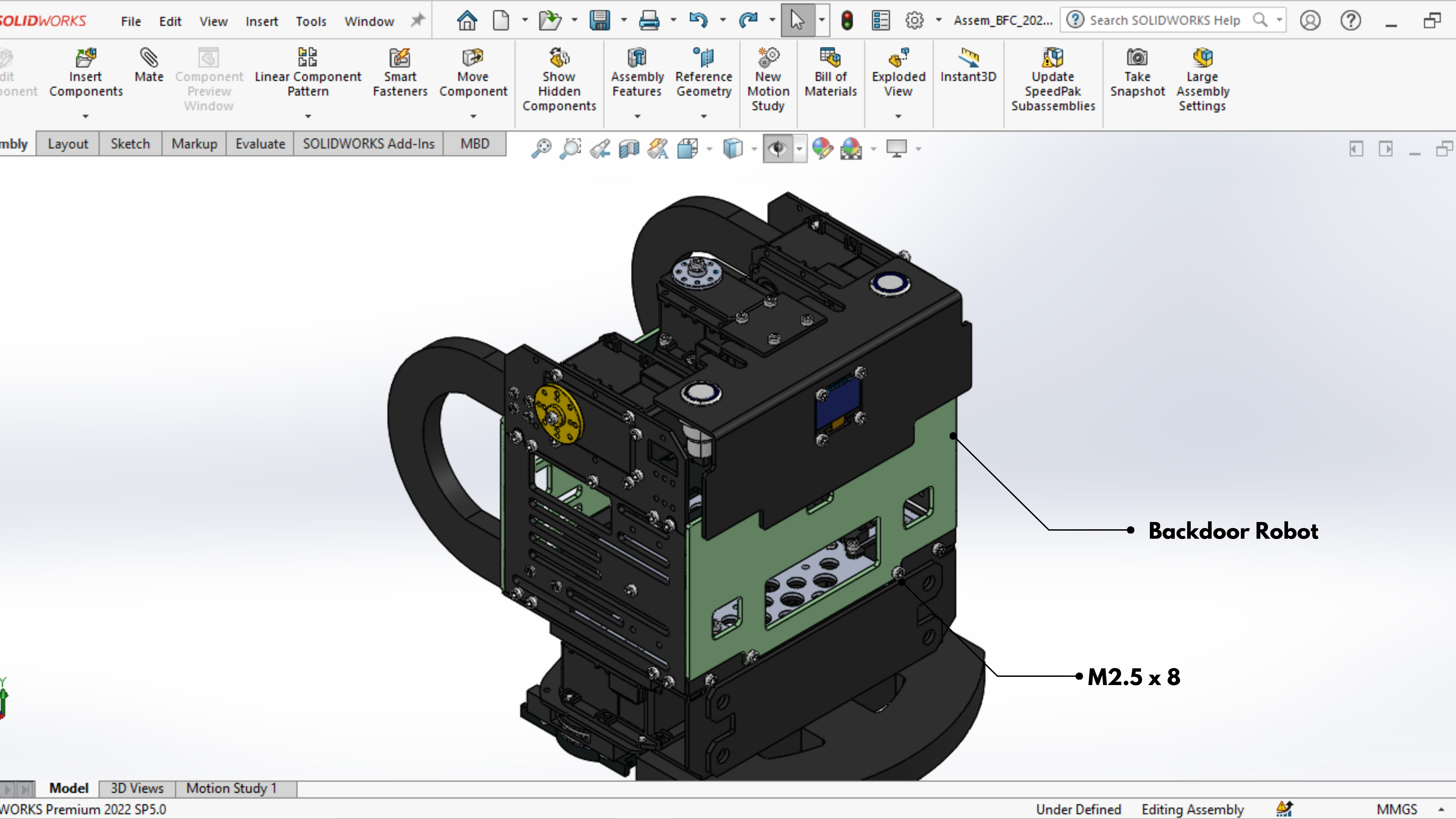
- pada bagian belakang, tutup body robot dengan part Backdoor Robot menggunakan 4 pcs baut M2.5 x 8.
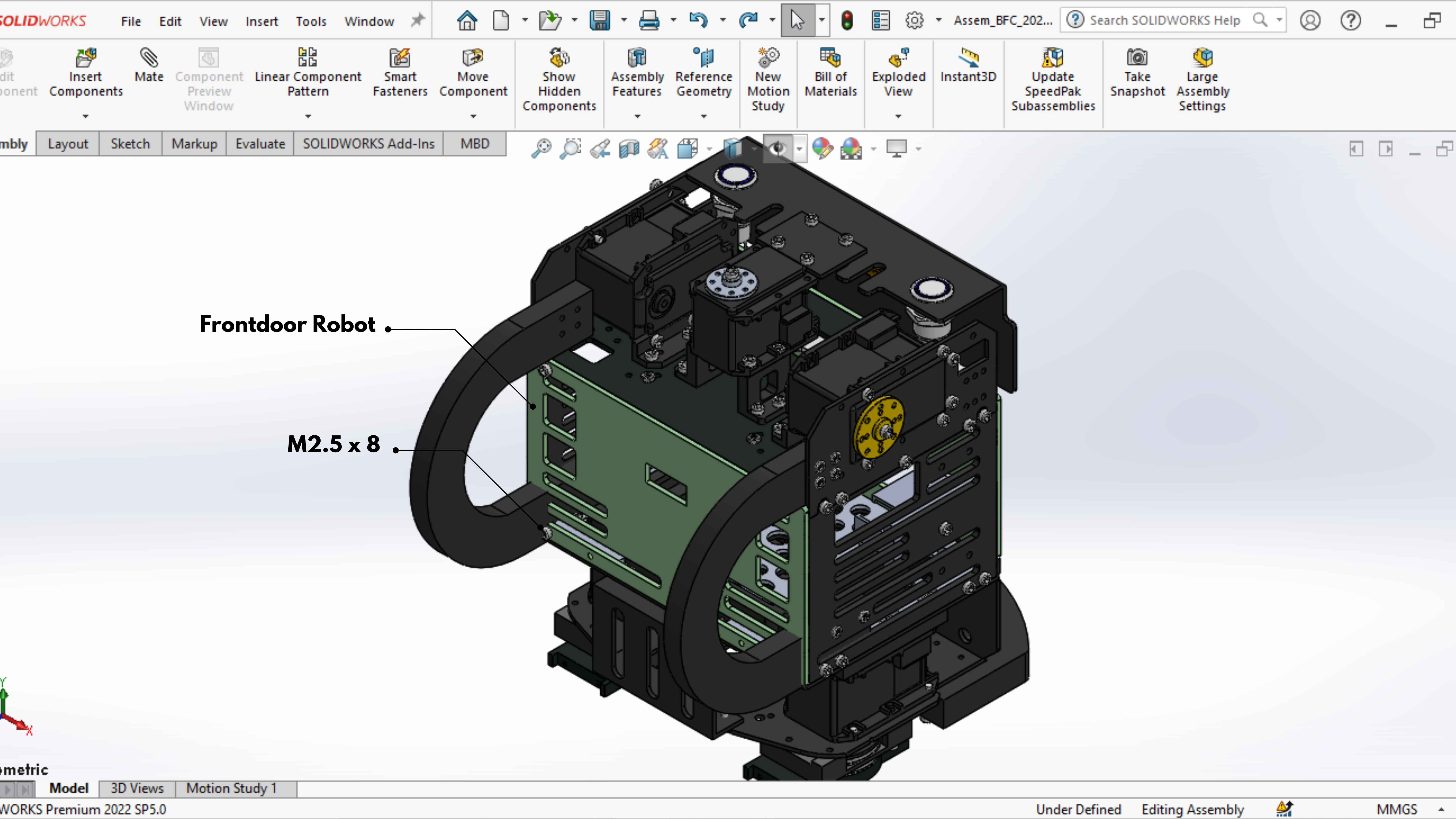
- Dan pada bagian depan, tutup body robot dengan part Frontdoor Robot menggunakan 4 pcs baut M2.5 x 8
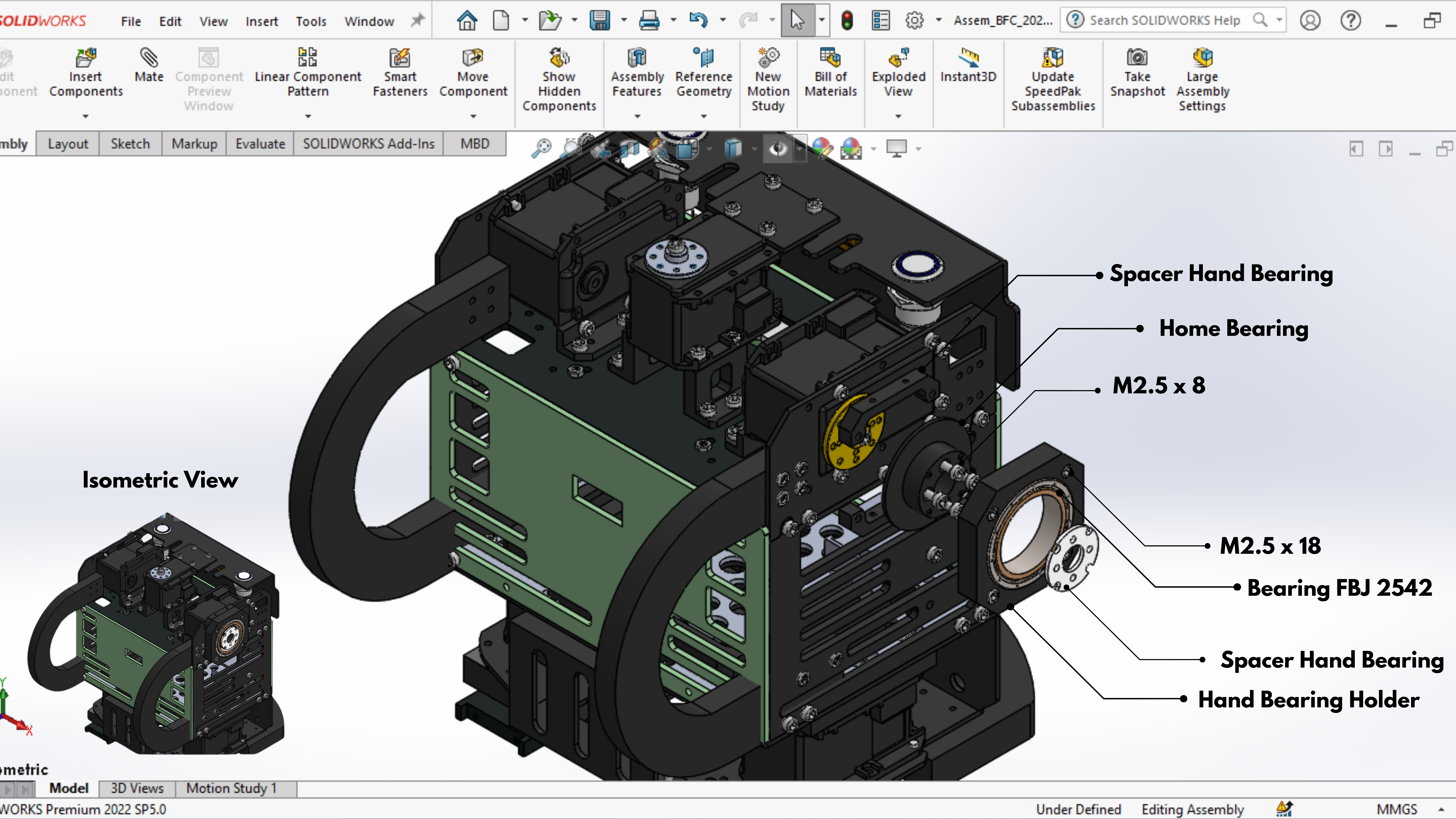
- selanjutnya pada kedua sisi badan, hubungkan sesuai urutan gambar. Home Bearing ke Horn Servo menggunakan 4 pcs baut M2.5 x 8, Hand Bearing Holder & Spacer Hand Bearing ke Upper Side Chest menggunakan 4 pcs baut M2.5 x 18
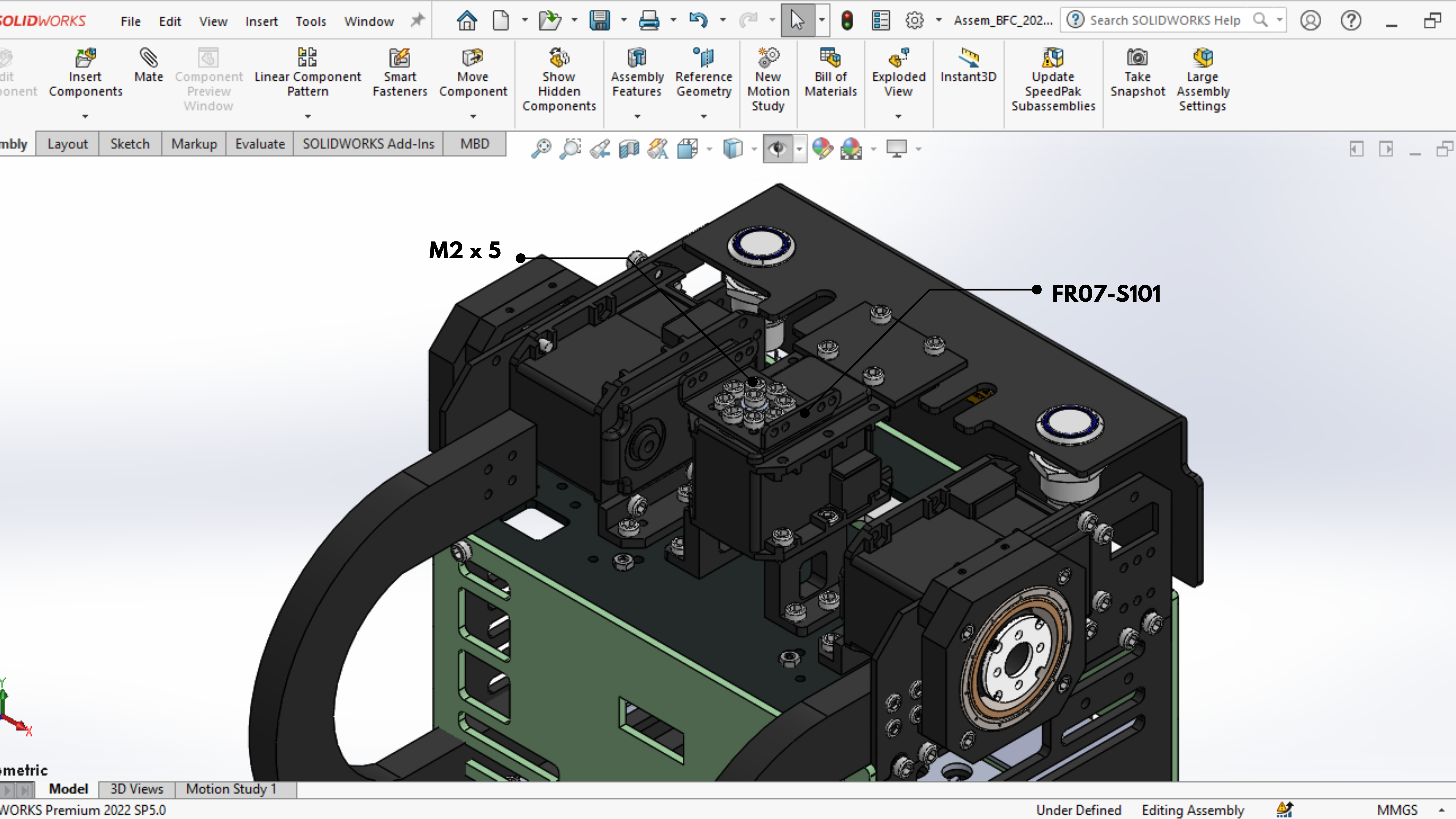
- Terakhir berikan part FR07-S101 ke Horn servo ID 19 menggunakan 8 pcs Baut M2 x 5.
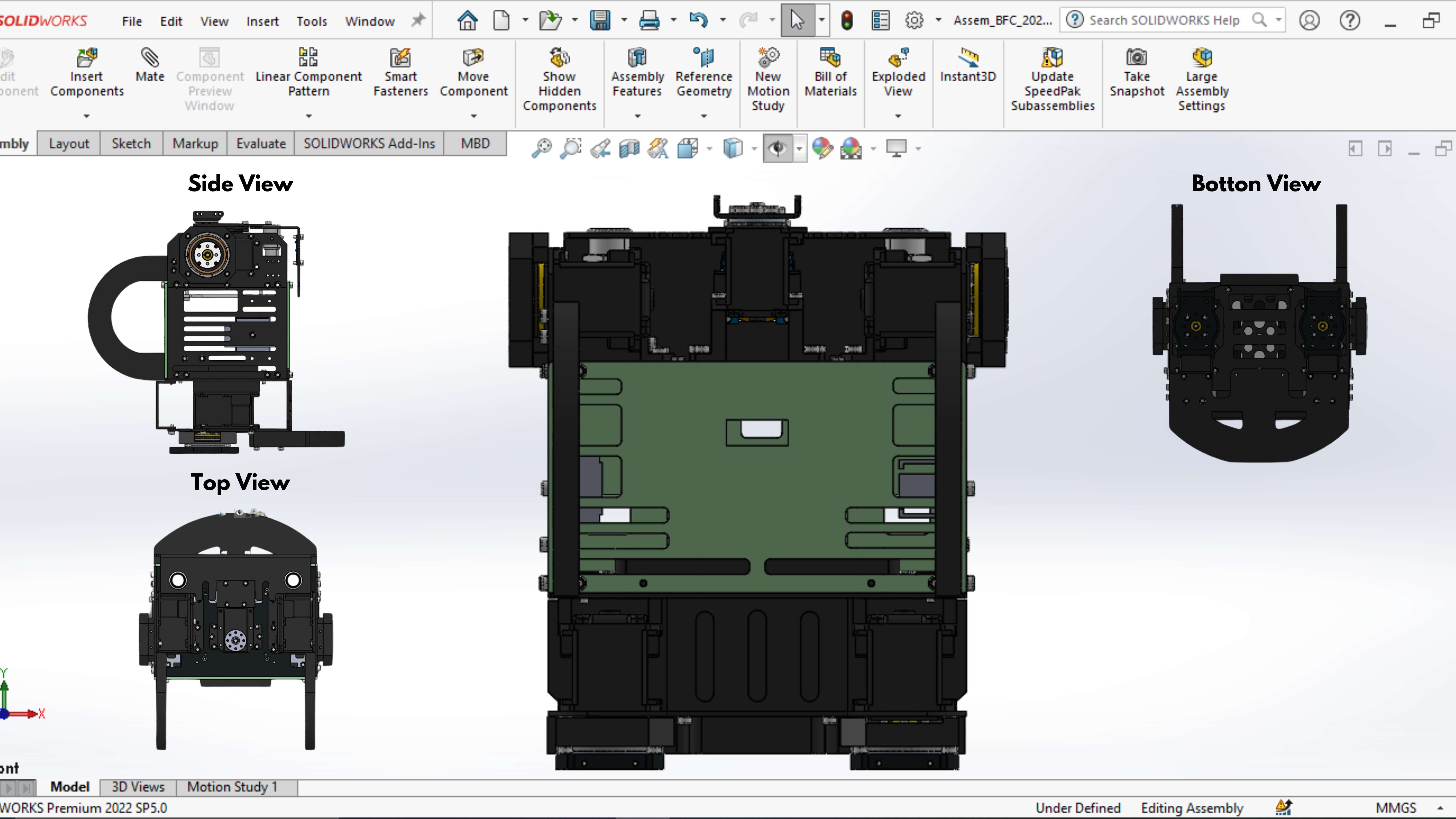
- Maka hasil akhir pada step Assembly Body Robot akan seperti gambar berikut.
4. Assembly Tangan Robot
- Hubungkan Part Hand Derlin ke part Hand Join menggunkan 6 pcs baut M2.5 x 8 dan Locknut.
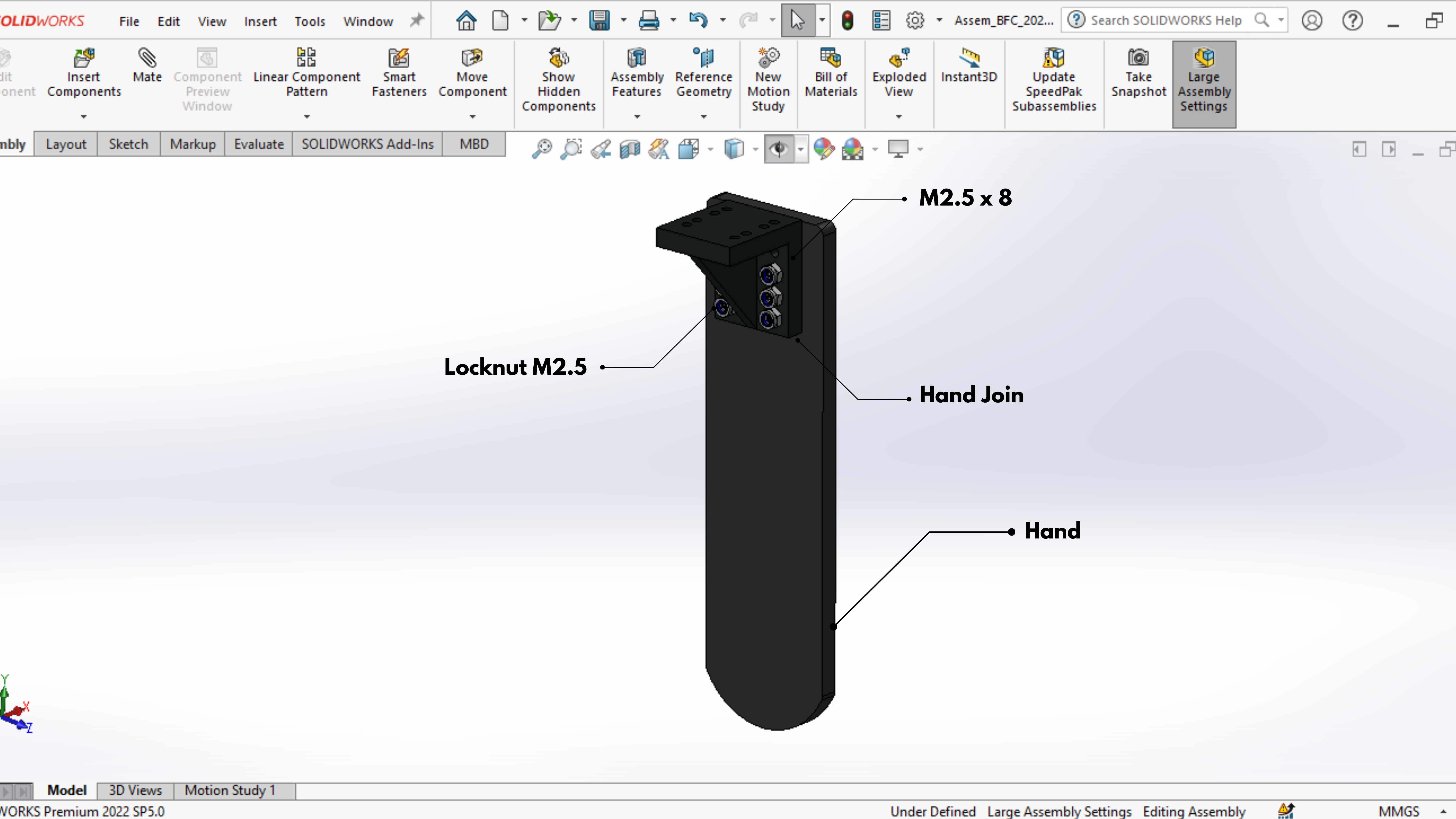
- Kemudian, hubungkan part Hand Join dengan dengan part FR05 Hand Join Menggunakan 4 pcs baut M2.5 x 8 & Locknut.
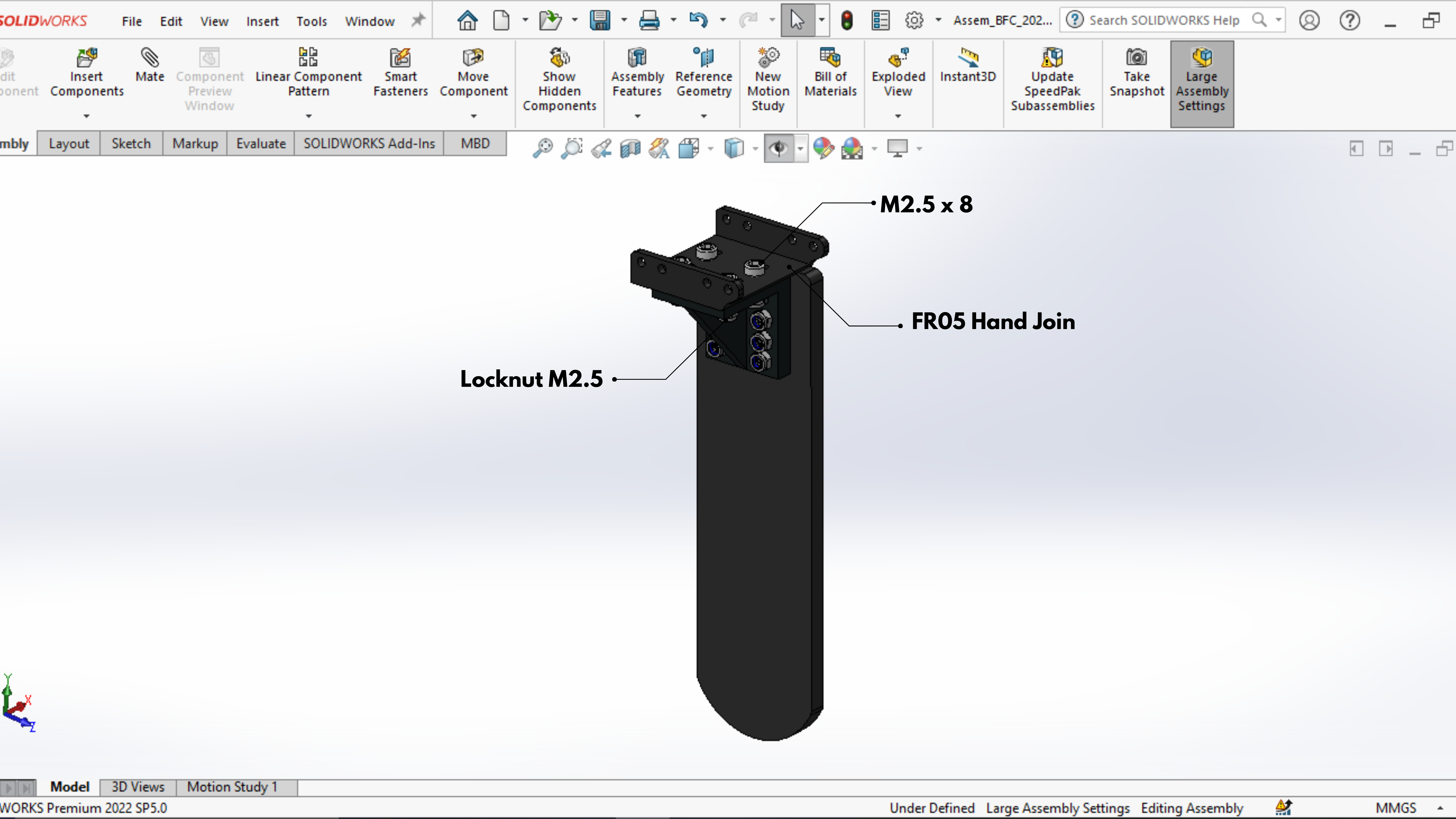
- Hubungkan servo ID 6 dengan part FR05 Hand Join menggunakan 4 pcs baut M2.5 x 8.
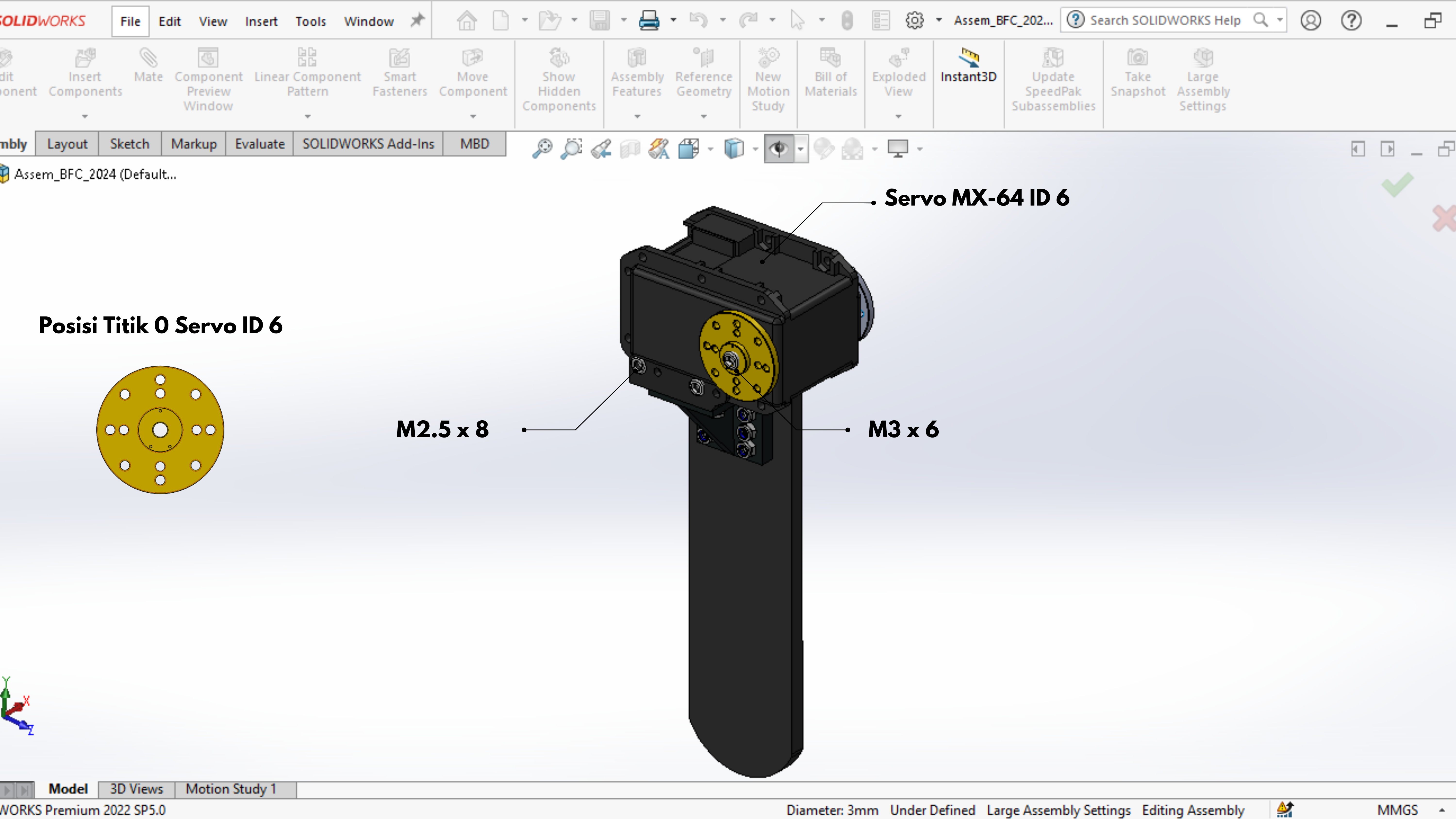
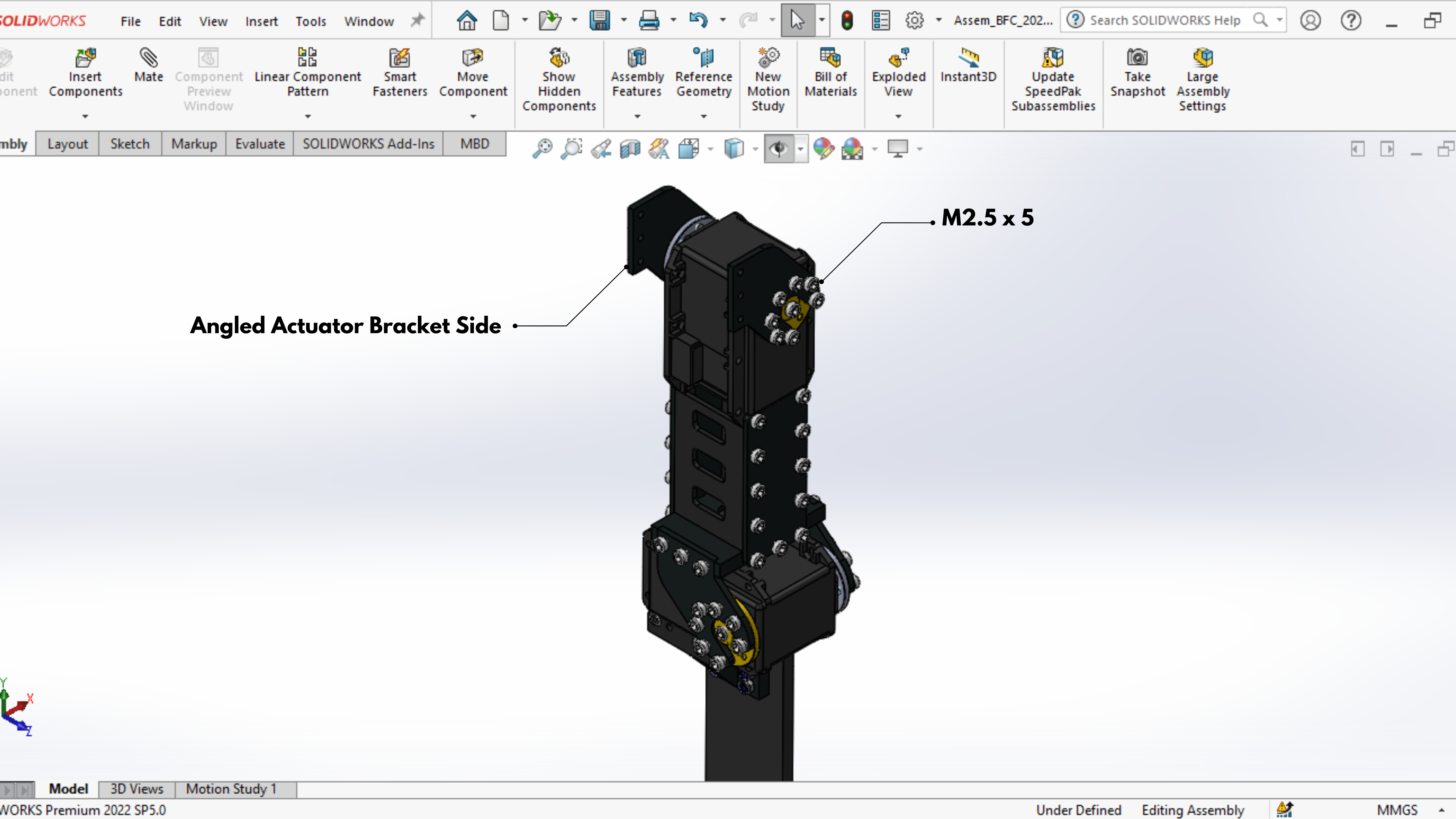
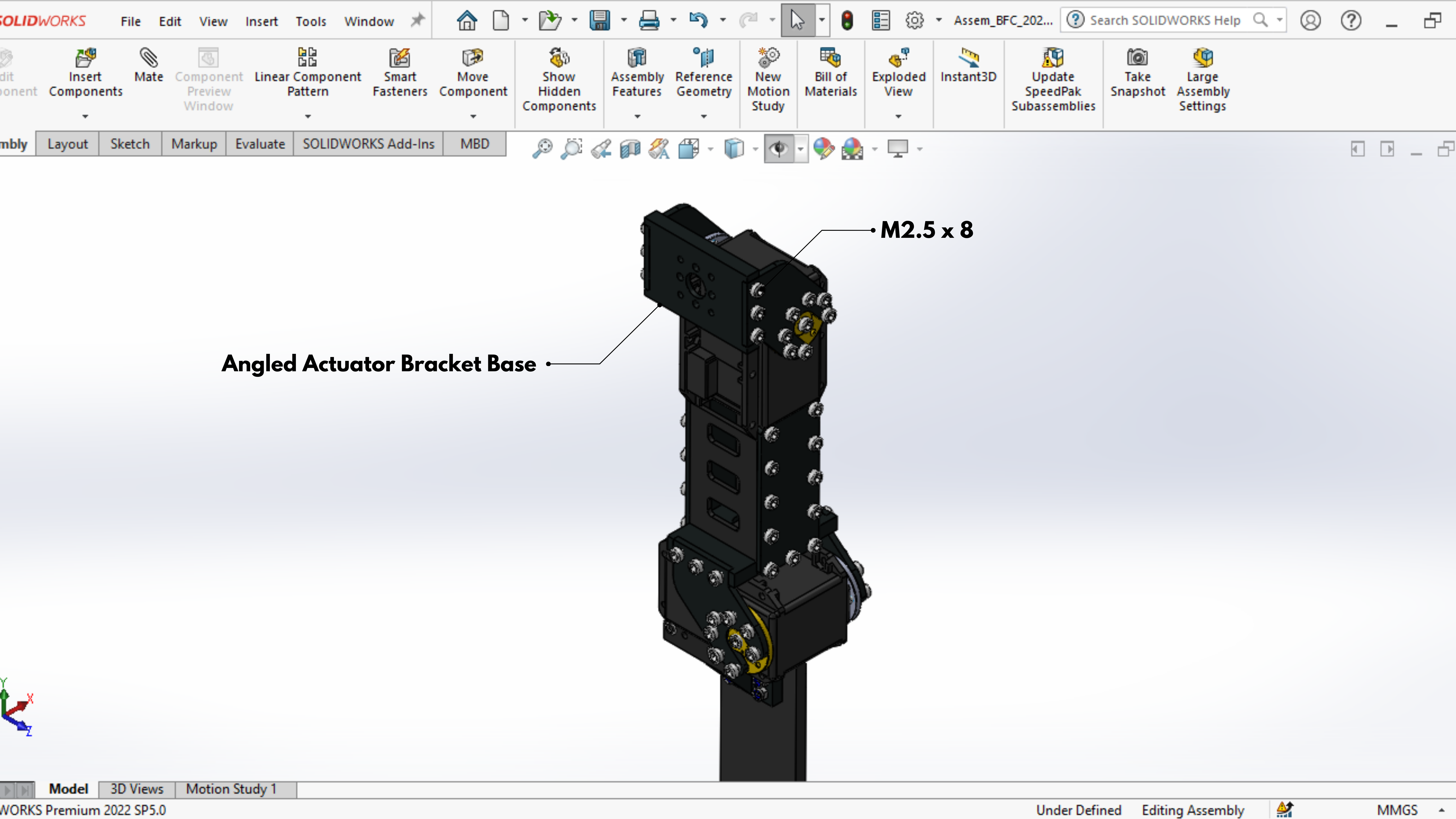
- kemudian pada horn servo dipasangkan part Angled Actuator Bracket Side menggunakan 7 pcs baut M2.5 x 5.
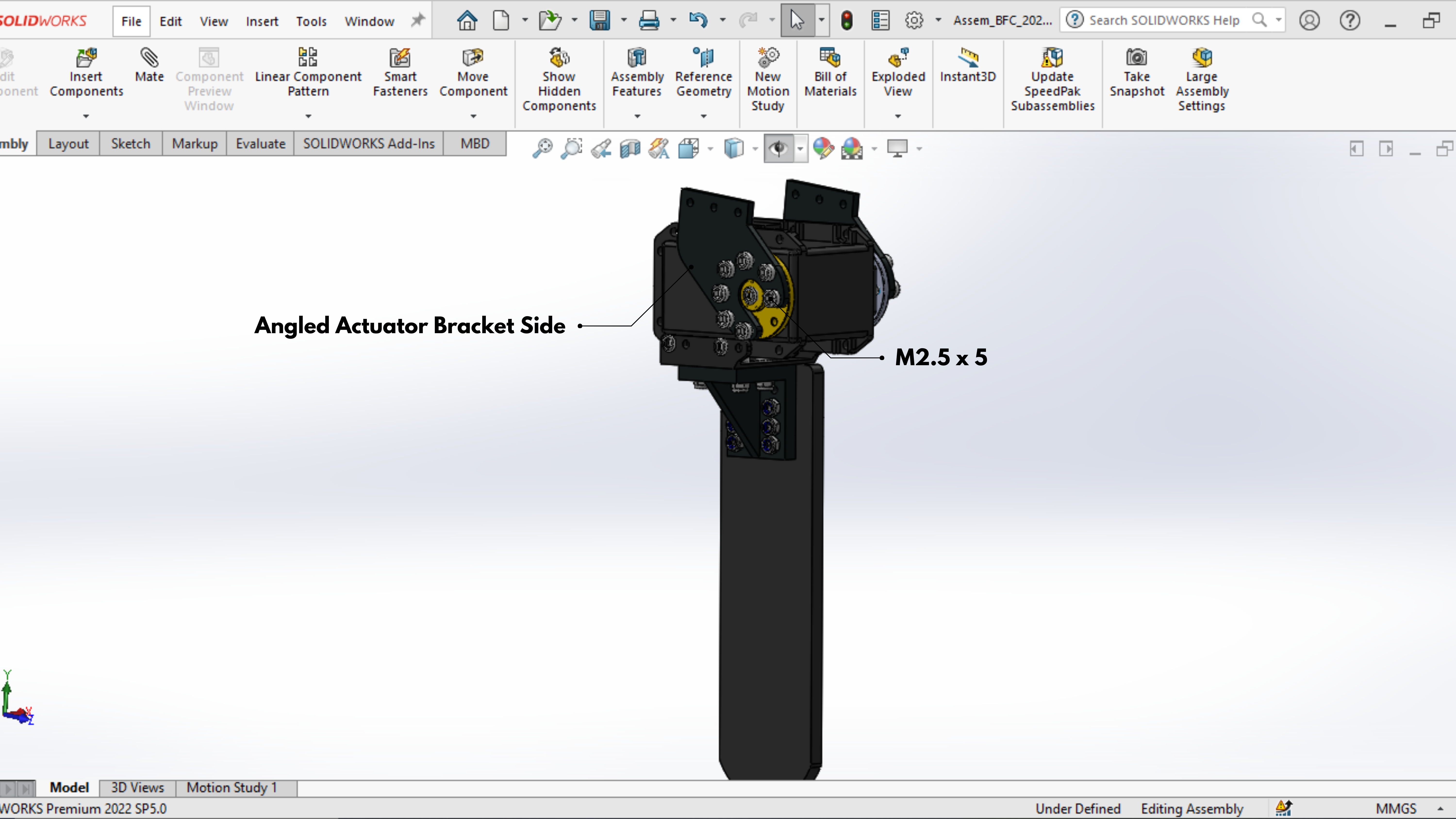
- Hubungkan kedua Angled Actuator Bracket Side dengan part Angled Actuator Bracket Base menggunakan 6 pcs baut M2.5 x 8.
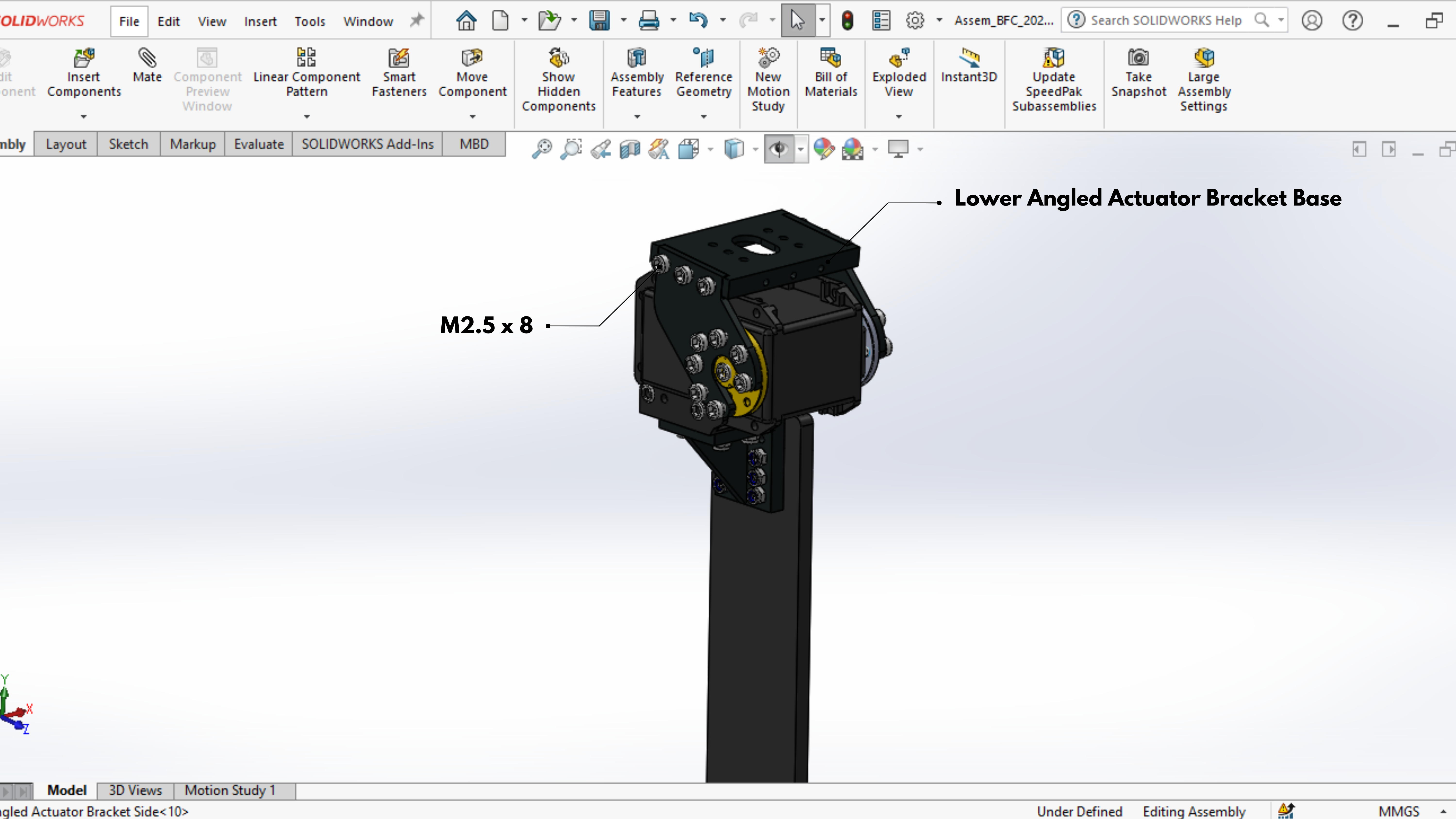
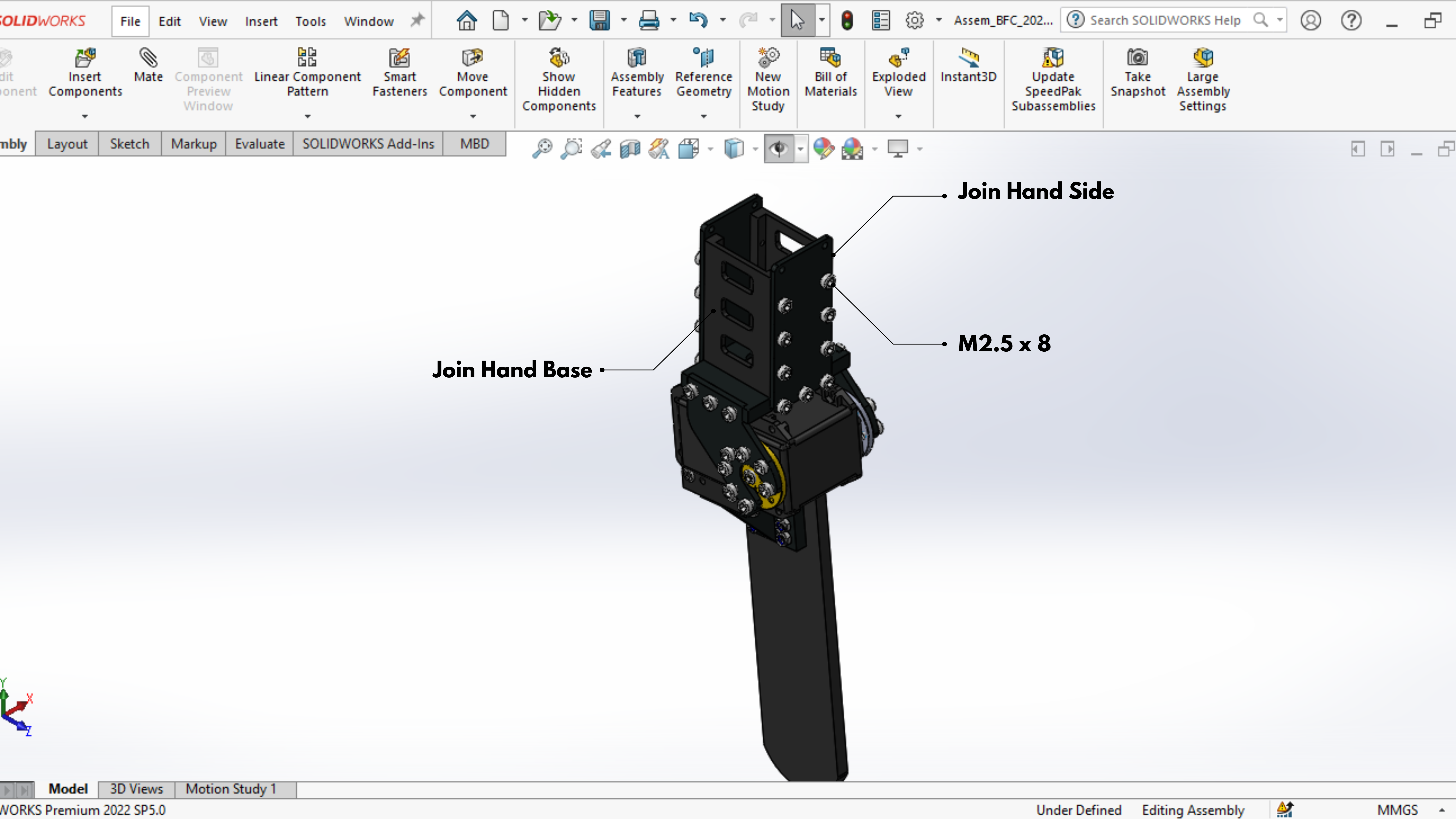
- Kemudian, memasang part Join Hand Side pada kedua sisi part Angled Actuator Bracket Base dengan menggunakan 6 pcs baut M2.5 x 8. selanjutnya diantara Join Hand Side dipasangkan part Join Hand Base menggunakan 12 pcs baut M2.5 x 8.
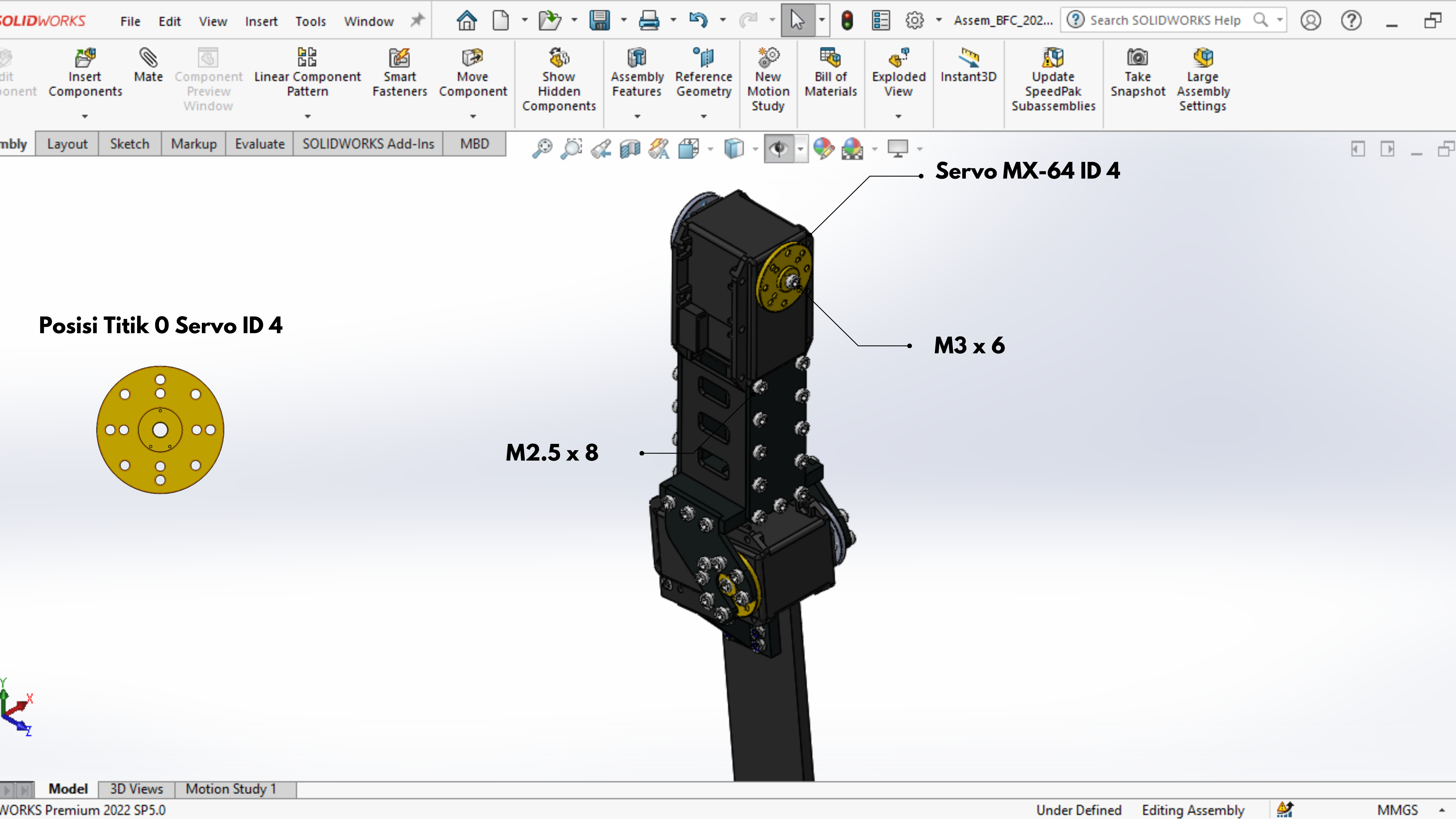
- Kemudian hubungkan motor Servo MX-64 ID 4 dengan part Join Hand Side menggunakan 4 pcs baut M2.5 x 8.
- Pada kedua horn servo hubungkan dengan Angled Actuator Bracket Side menggunakan 14 pcs baut M2.5 x 5.
- diantara kedua Angled Actuator Bracket Side hubungkan dengan part Angled Actuator Bracket Base menggunakan 6 pcs baut M2.5 x 8.
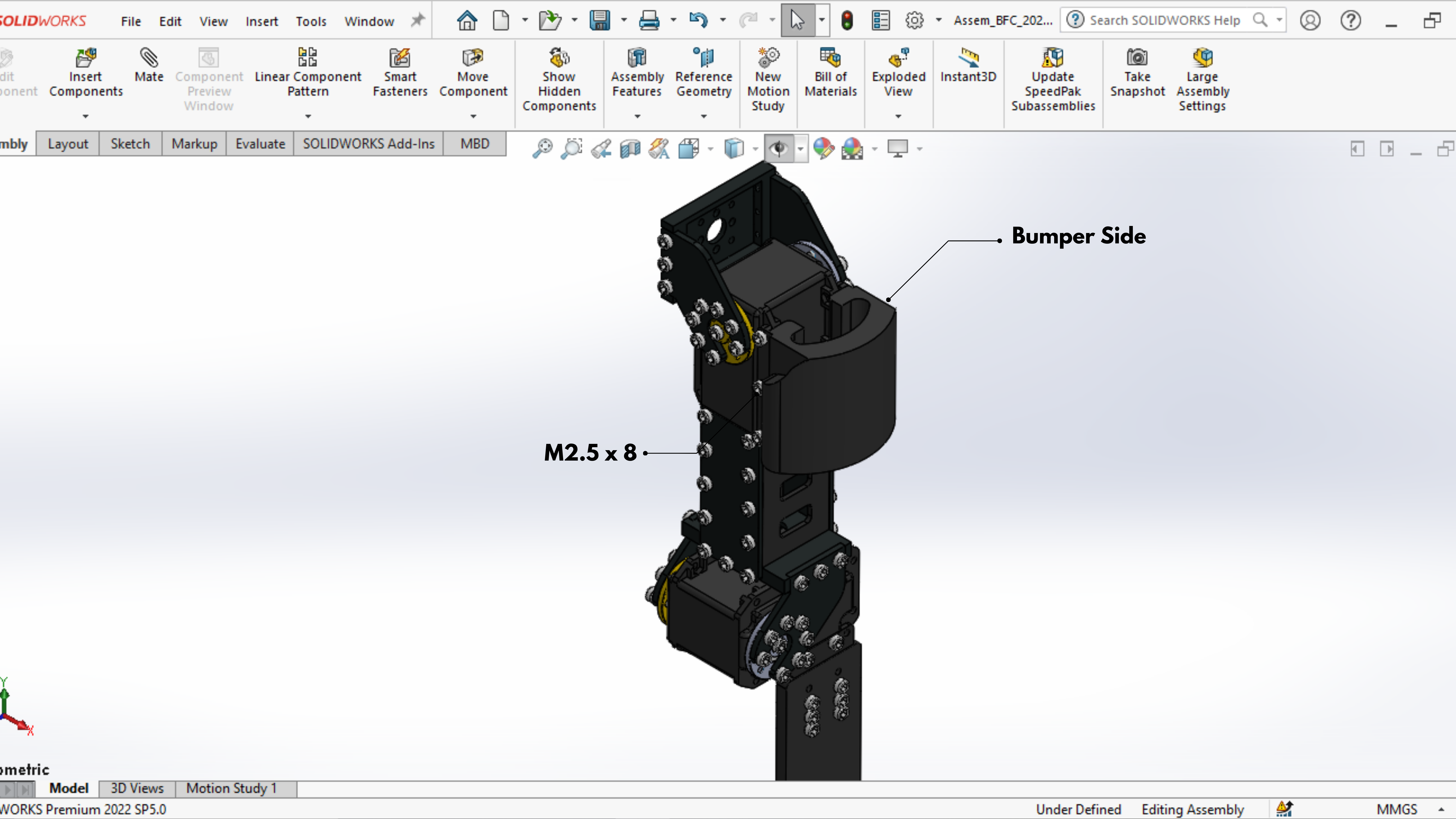
- Terakhir pada sisi luar servo MX-64 ID 4 diberikan part Bumper Side dengan menggunakan 6 pcs baut M2.5 x 8.
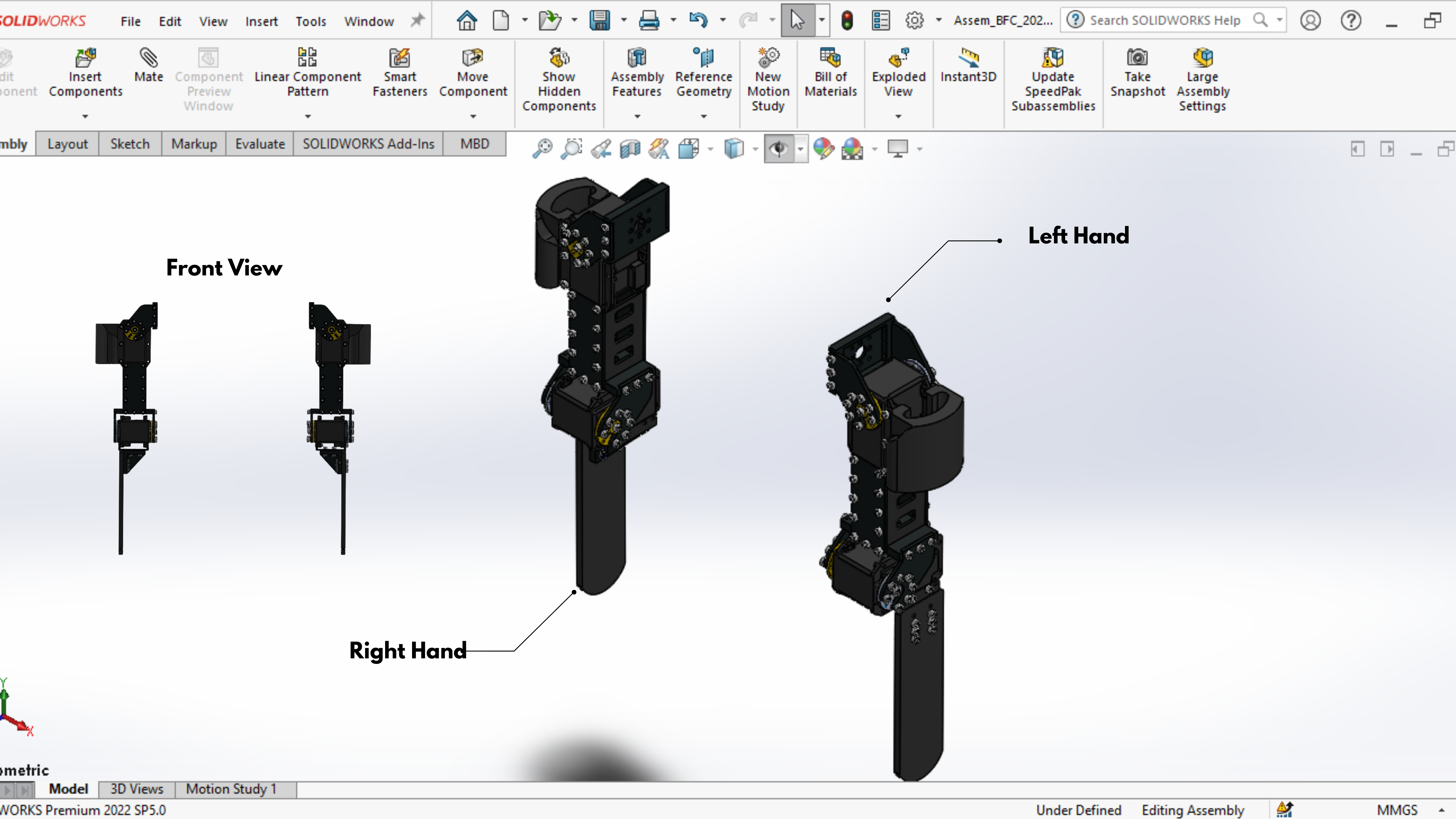
- Lakukan Hal yang sama seperti langkah langkah sebelumnya, maka hasil akhir dari Assembly Tangan Robot akan seperti pada gambar berikut.
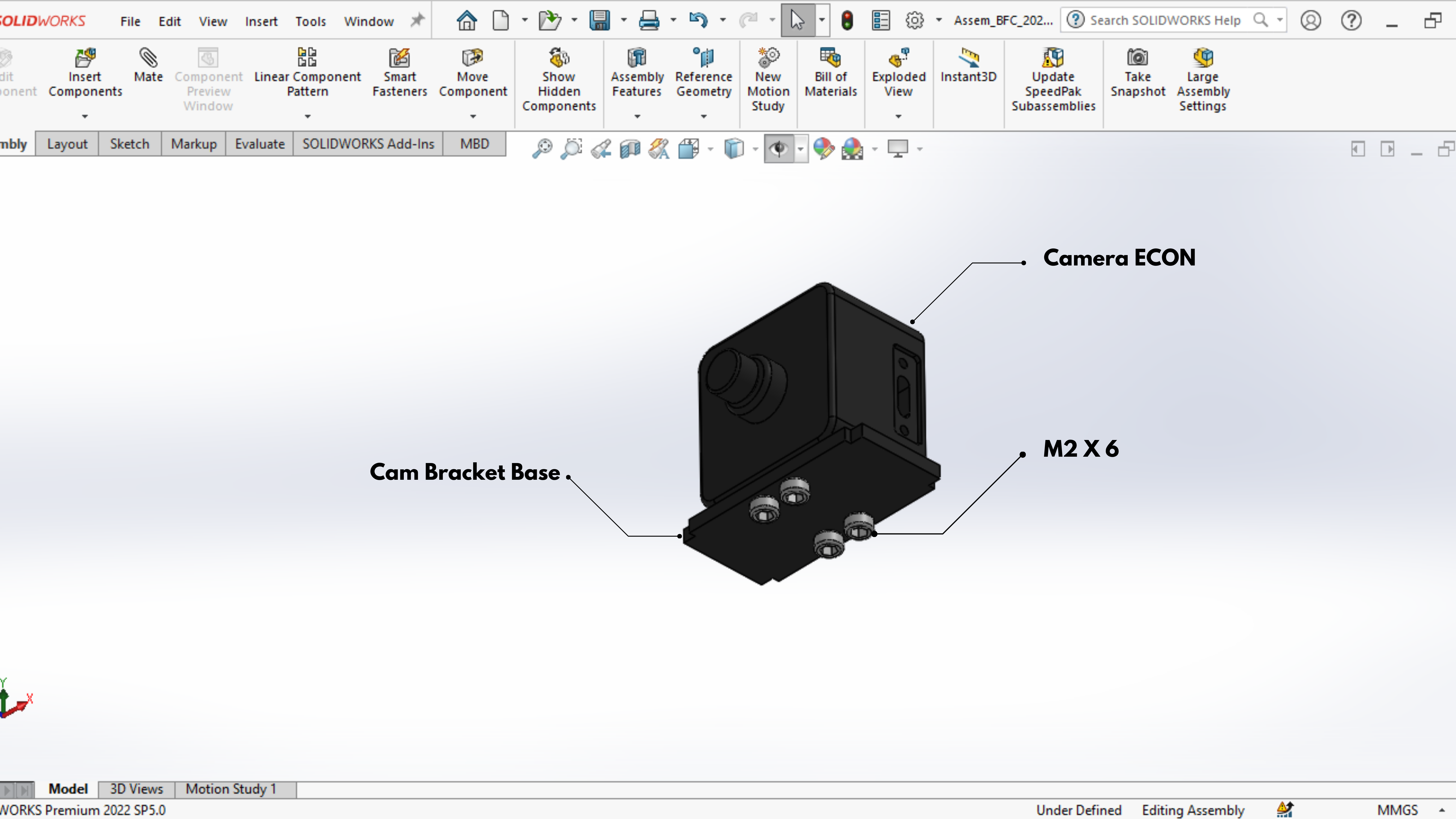
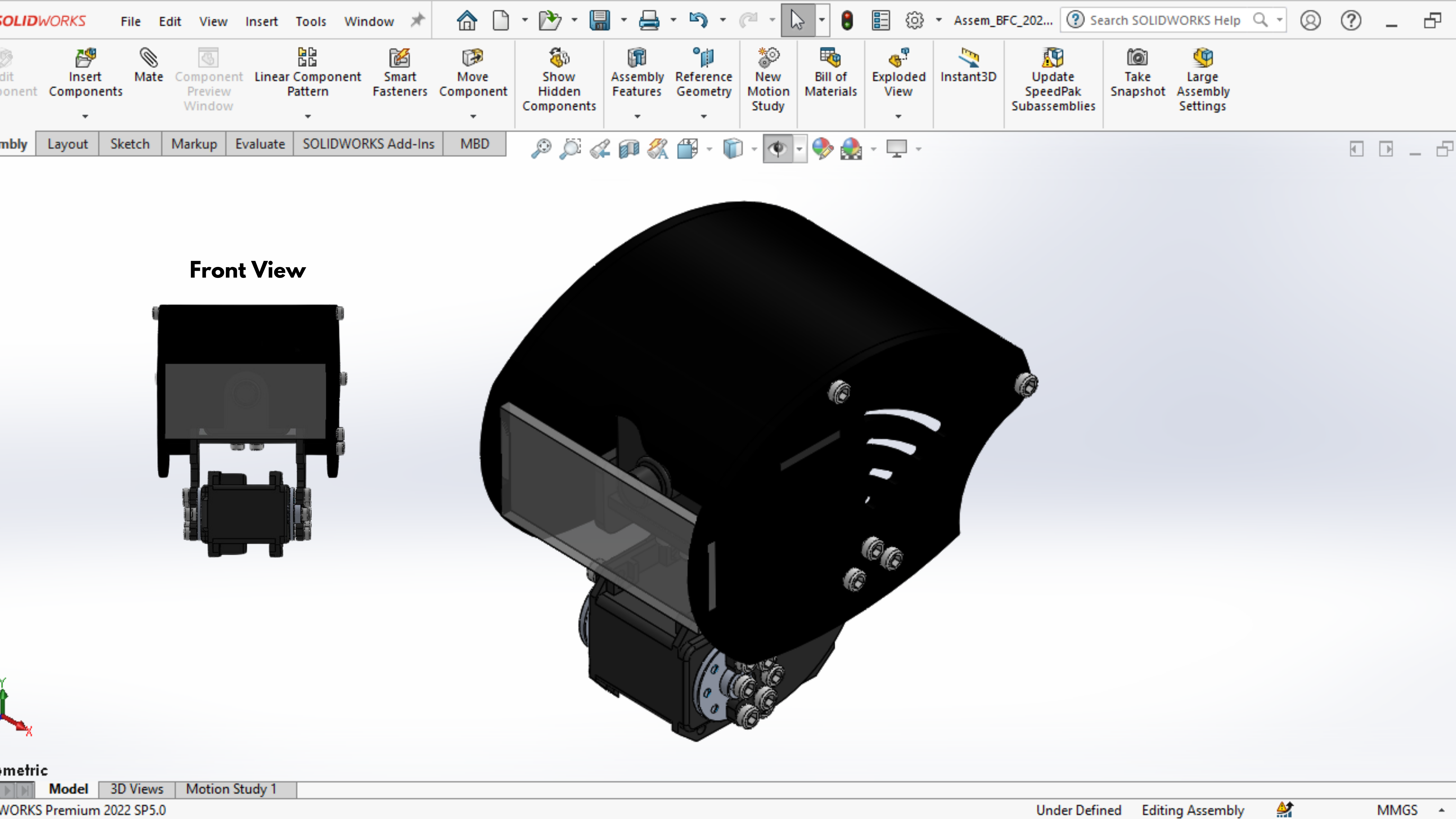
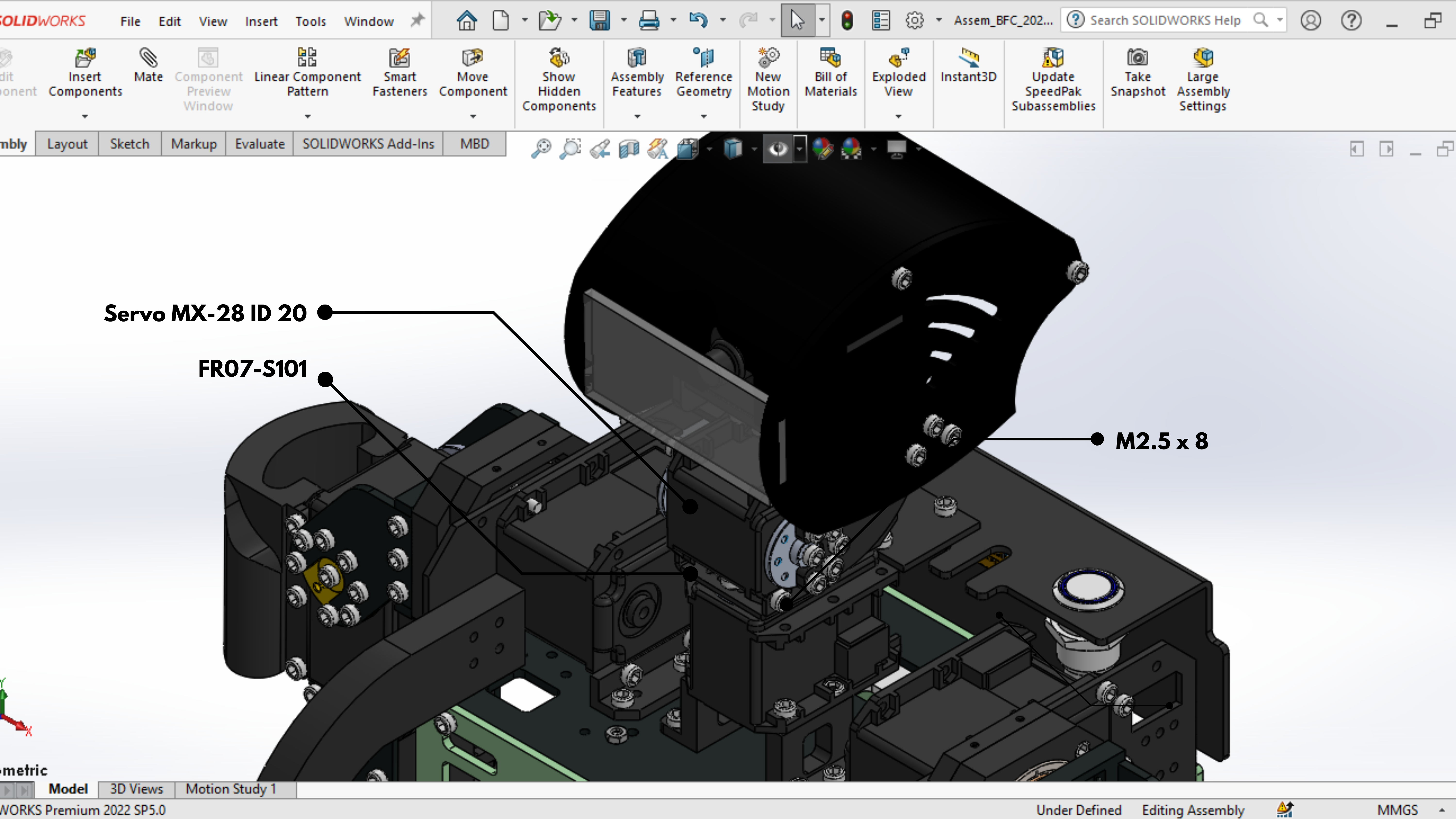
5. Assembly Kepala Robot
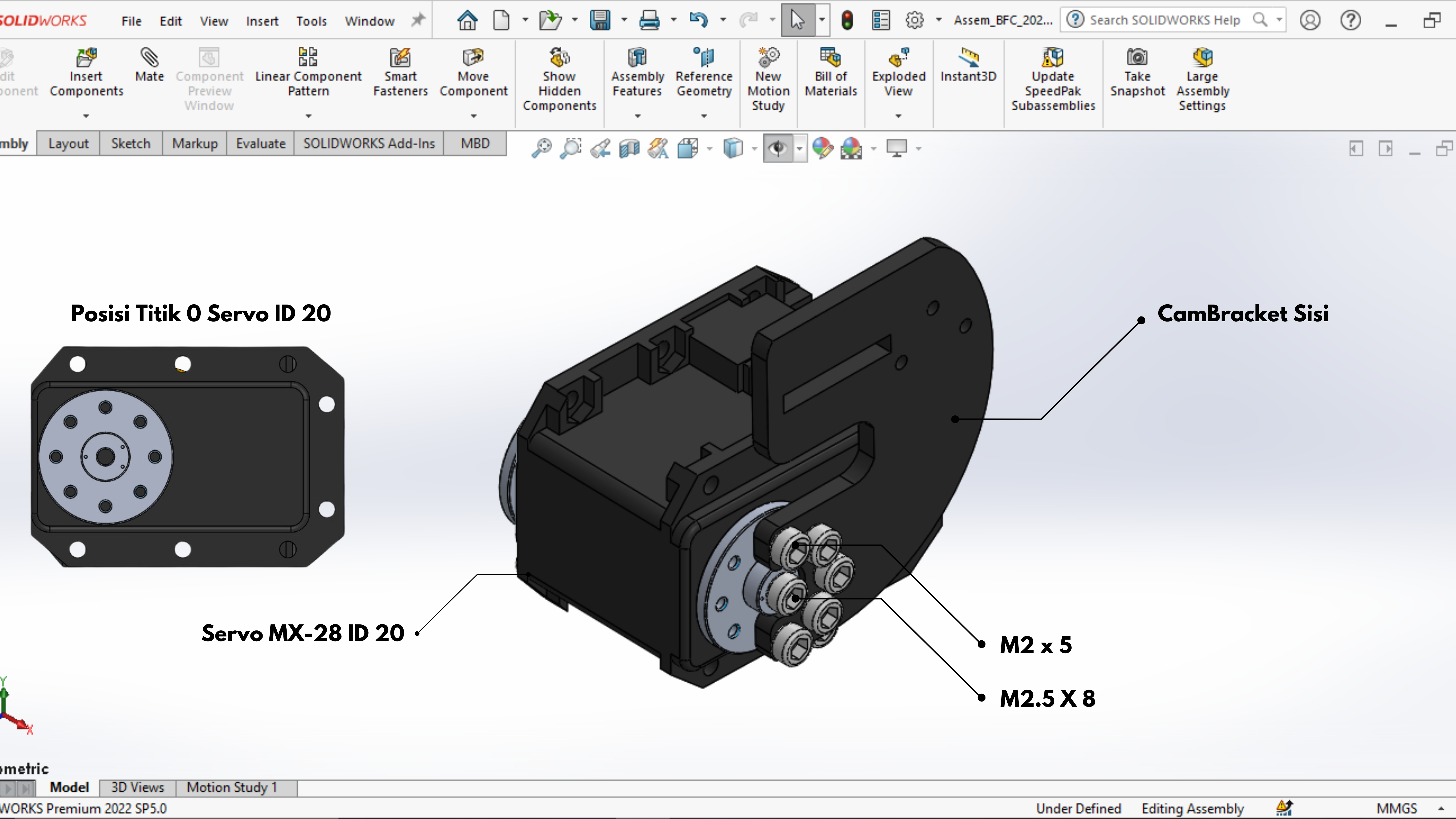
- Siapkan motor Servo MX-28 ID 20 kemudian pasangkan salah satu sisi horn dengan Cam Bracket Sisi menggunakan 5 pcs baut M2 x 5.
- Siapkan Camera Econ kemudian hubungkan dengan part Cam Bracket Base menggunakan 4 pcs baut M2 x 6.
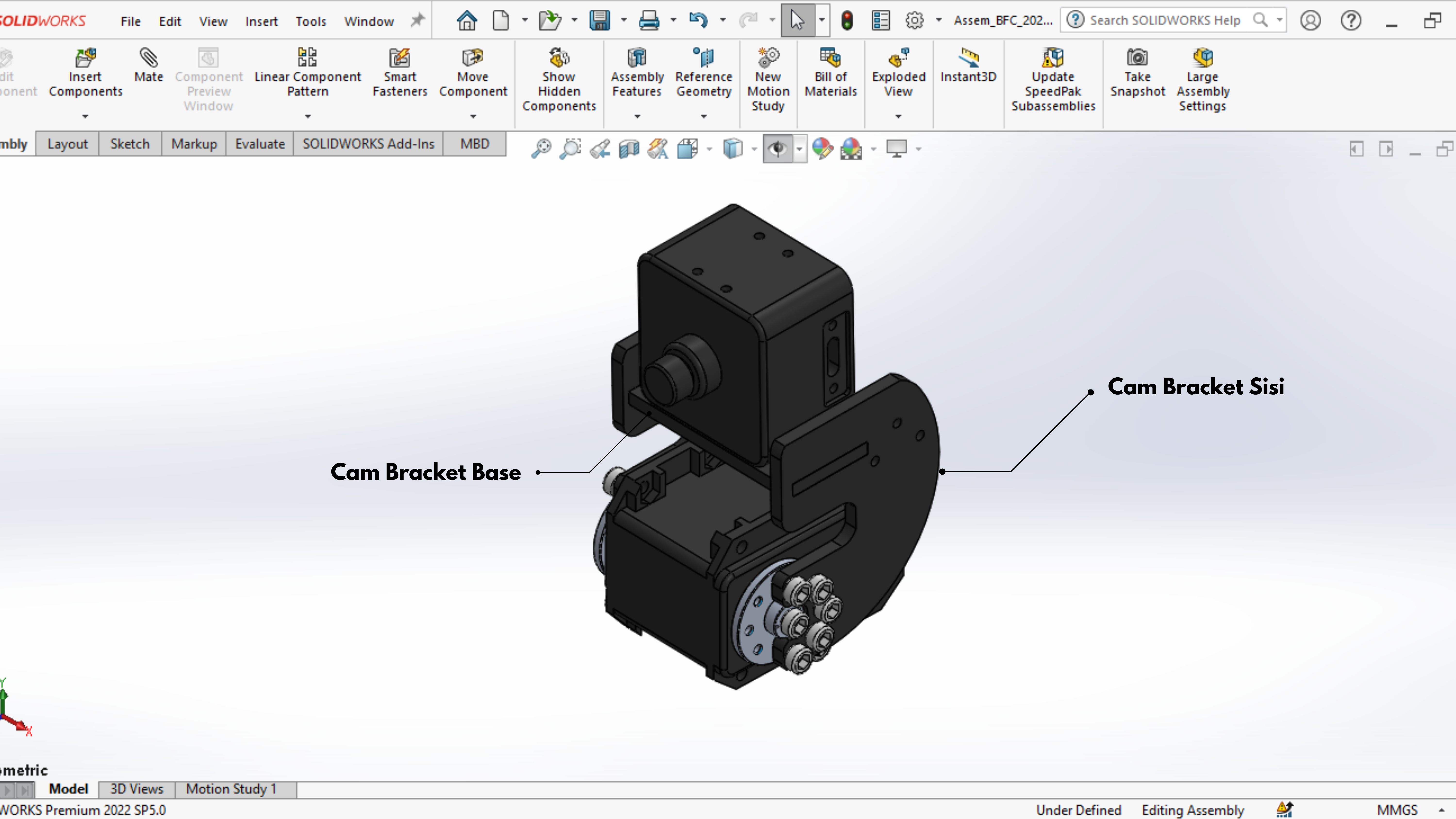
- Setelah itu hubungkan Cam Bracket Base dengan Cam Bracket Sisi dan pasangkan Cam Bracket Sisi pada sisi horn lain untuk mengunci cam bracket base menggunakan 5 pcs baut M2 x 5.
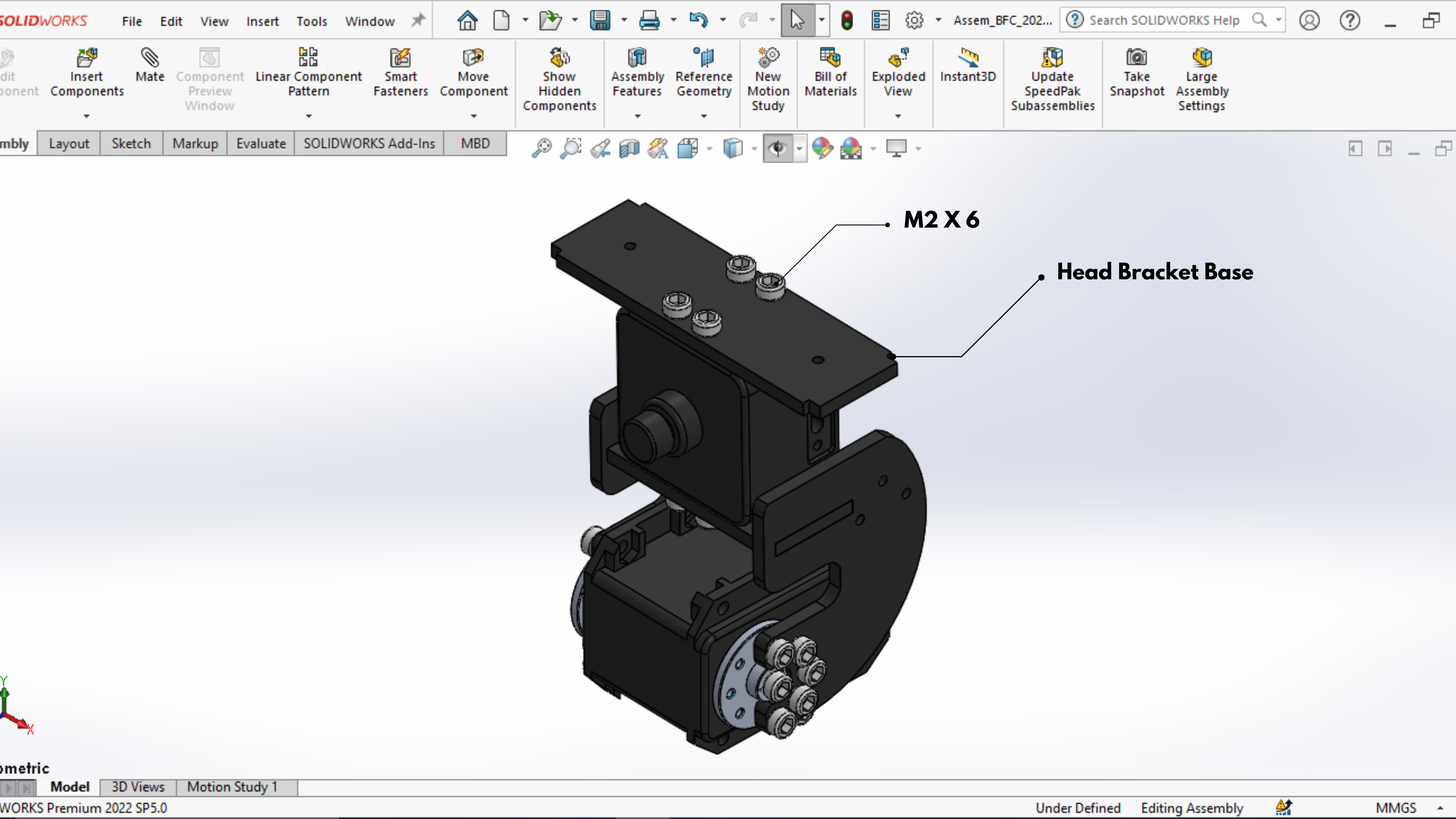
- Selanjutnya berikan Head Bracket Base pada sisi atas Camera Econ menggunakan 4 pcs baut M2 x 6.
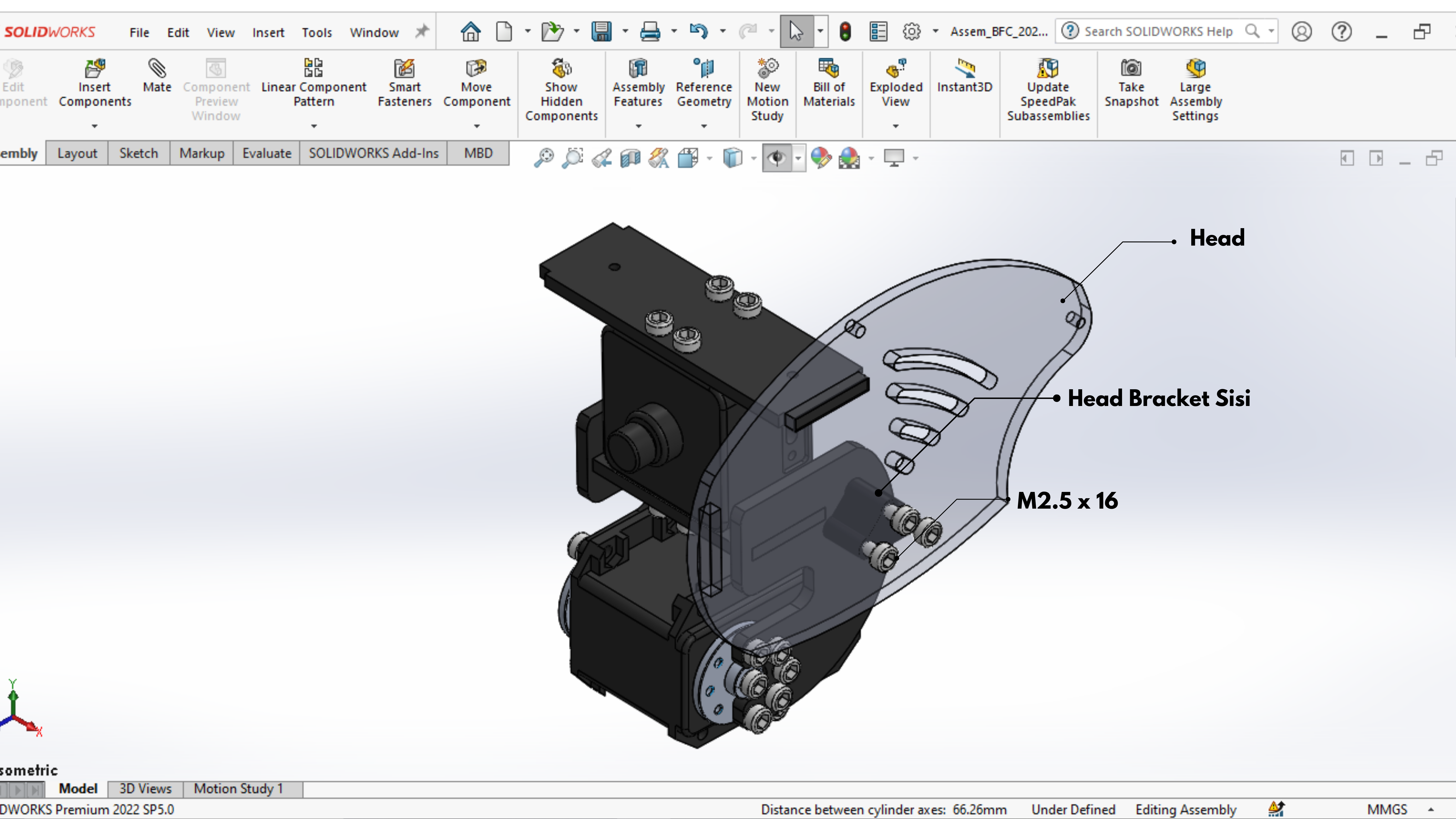
- Pada salah satu sisi berikan part Head Bracket Sisi untuk menghubungkan part Cam Bracket Sisi dengan part Head menggunakan 3 pcs Baut M2.5 x 16.
- Setelah itu hubungkan part Lens Protection dan Head Cover dengan part Head menggunakan 2 pcs baut M2.5 x 8.
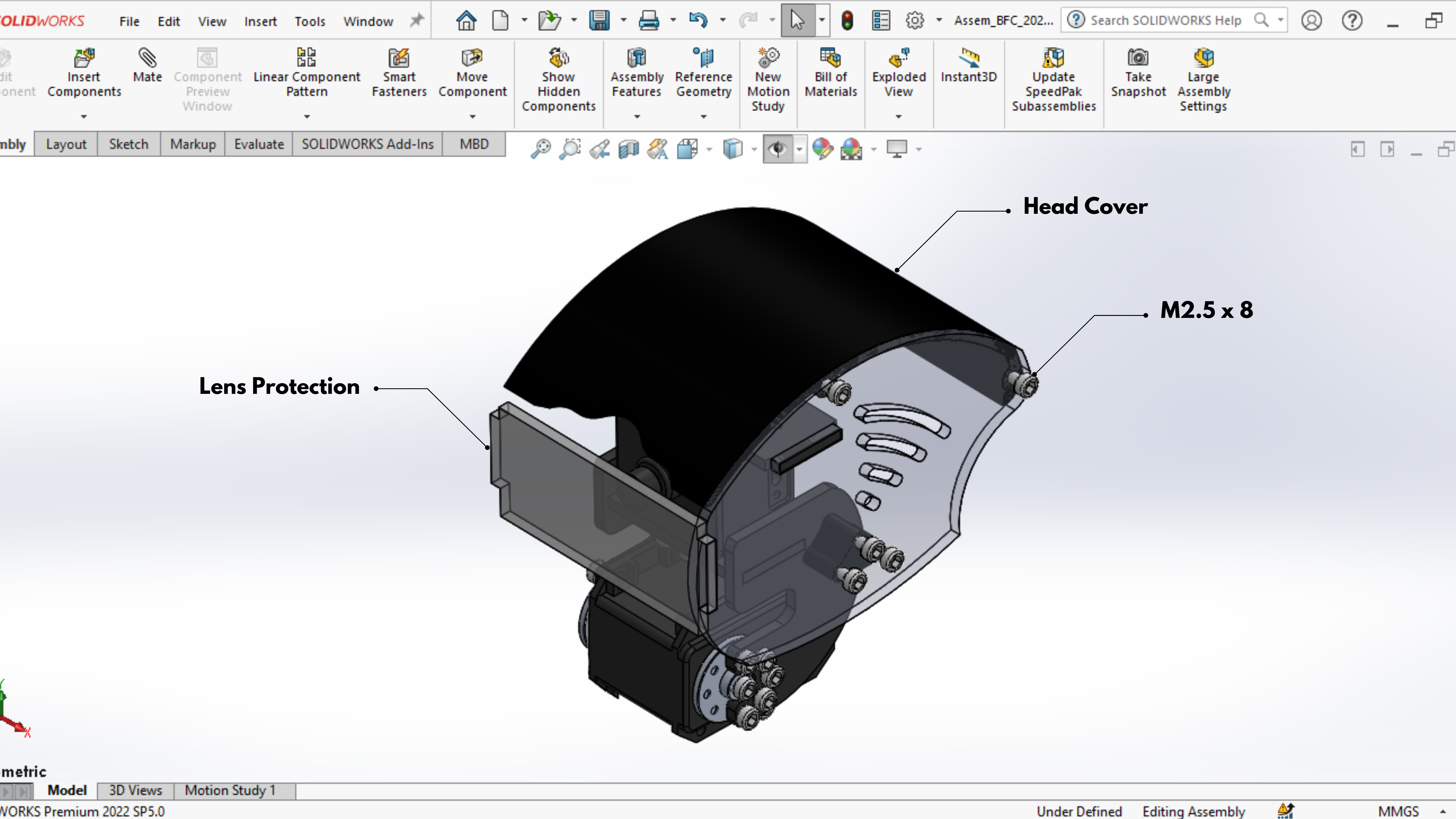
- Terakhir memasang part Head Bracket sisi pada sisi lain untuk mengunci part Lens Protection dan kunci ke part Head Cover menggunakan 2 pcs baut M2.5 x 8, maka hasil akhir dari Assembly Kepala Robot akan seperti gambar berikut.
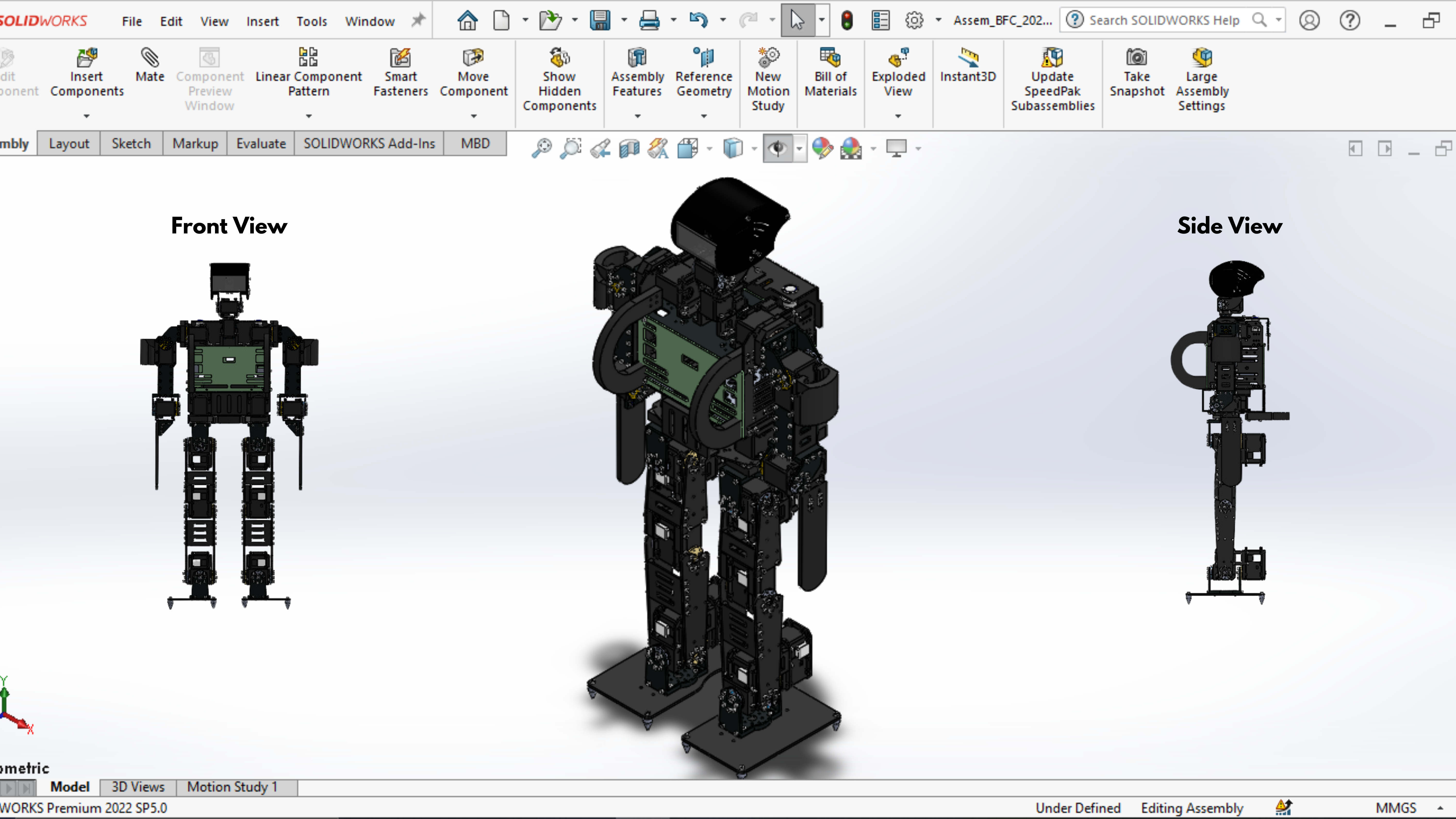
6. Assembly Robot
- Setelah Assembly Kaki dan Badan Selesai, maka Hubungkan part Hip Bracket Sisi dengan Ancle Bracket Base menggunakan 4 pcs baut M2.5 x 8 dan Loctite Thread Lock. lakukan pada kedua sisi kaki
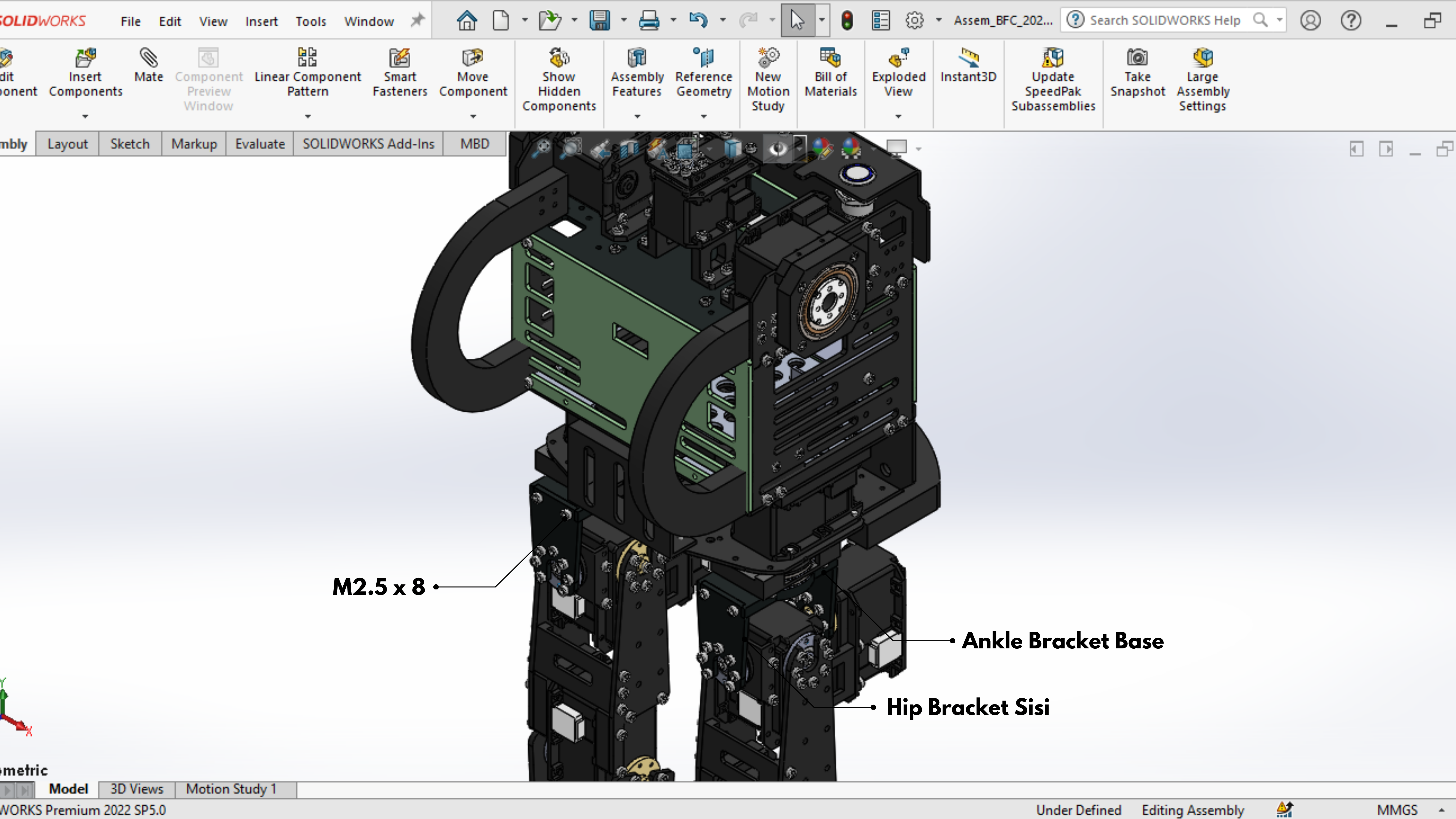
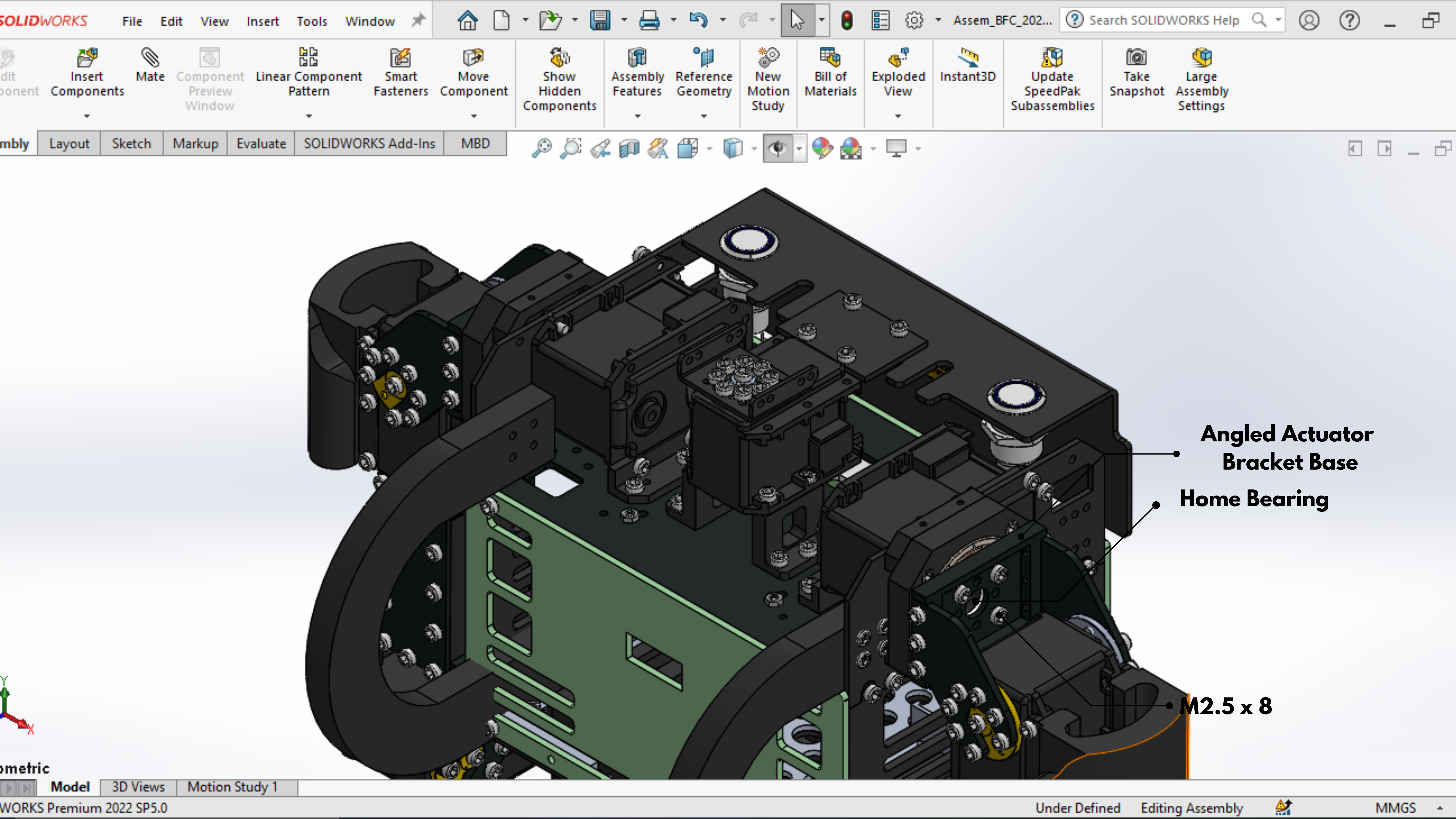
- Setelah Assembly Tangan dan Body Selesai, maka hubungkan part Home Bearing dengan part Angled Actuator Bracket Base menggunakan 4 pcs baut M2.5 x 8 dan Loctite Thread Lock.
- Setelah itu pada bagian Assembly Kepala dan Assembly Body robot, hubungkan part FR07-S101 dengan Servo MX-28 ID 20 Menggunakan 4 pcs Baut M2.5 x8 dan Nut M2.5.
- Maka tampilan akhir Assembly keseluruhan robot Humanoid Soccer Kid Size Barelang FC akan seperti gambar berikut
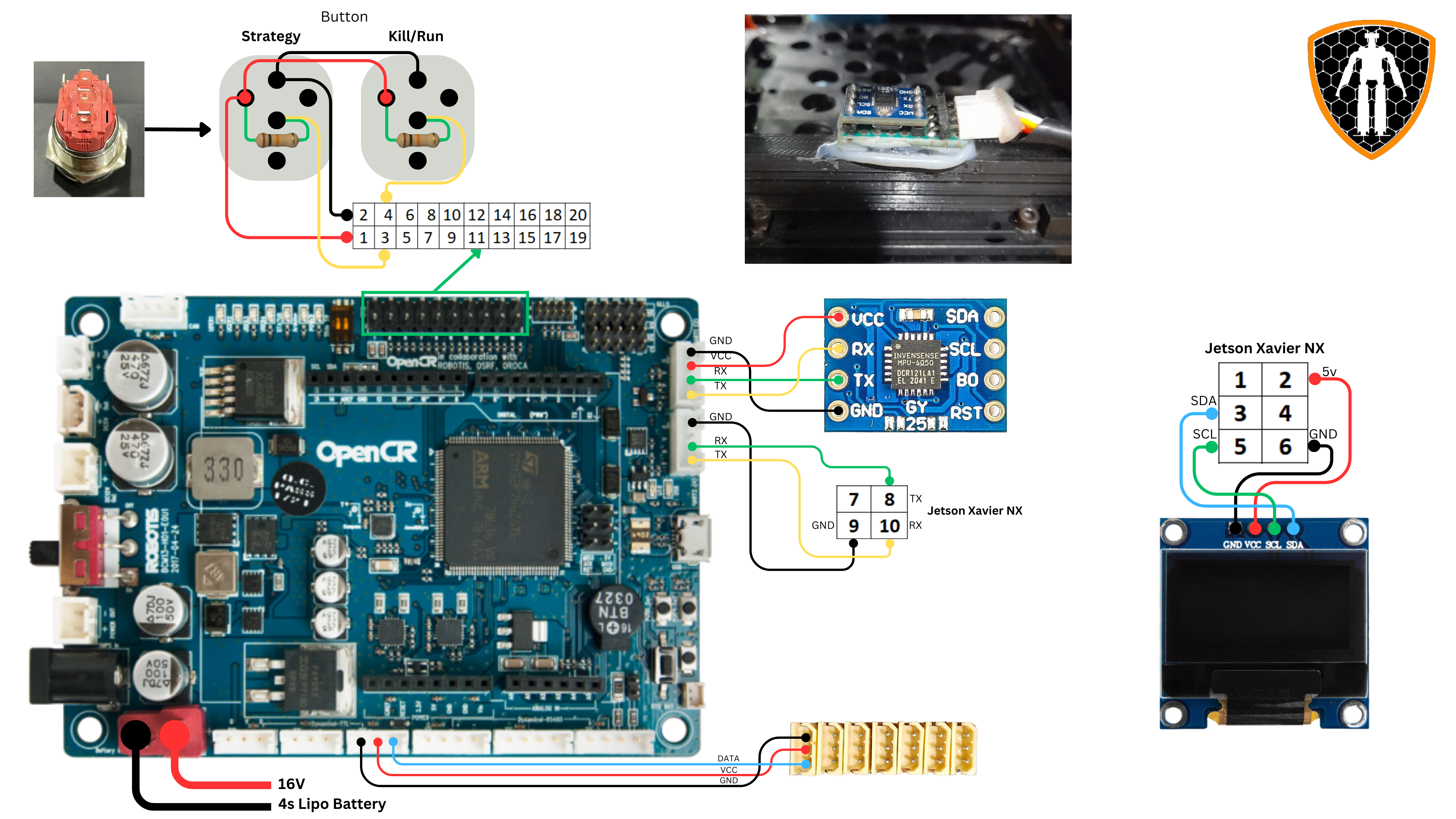
2. Wiring Electrical Robot
TODO: Senta & Kayla NOTES: Dilengkapi semua gambar rangkaian electrical
Pinout Jetson Xavier NX
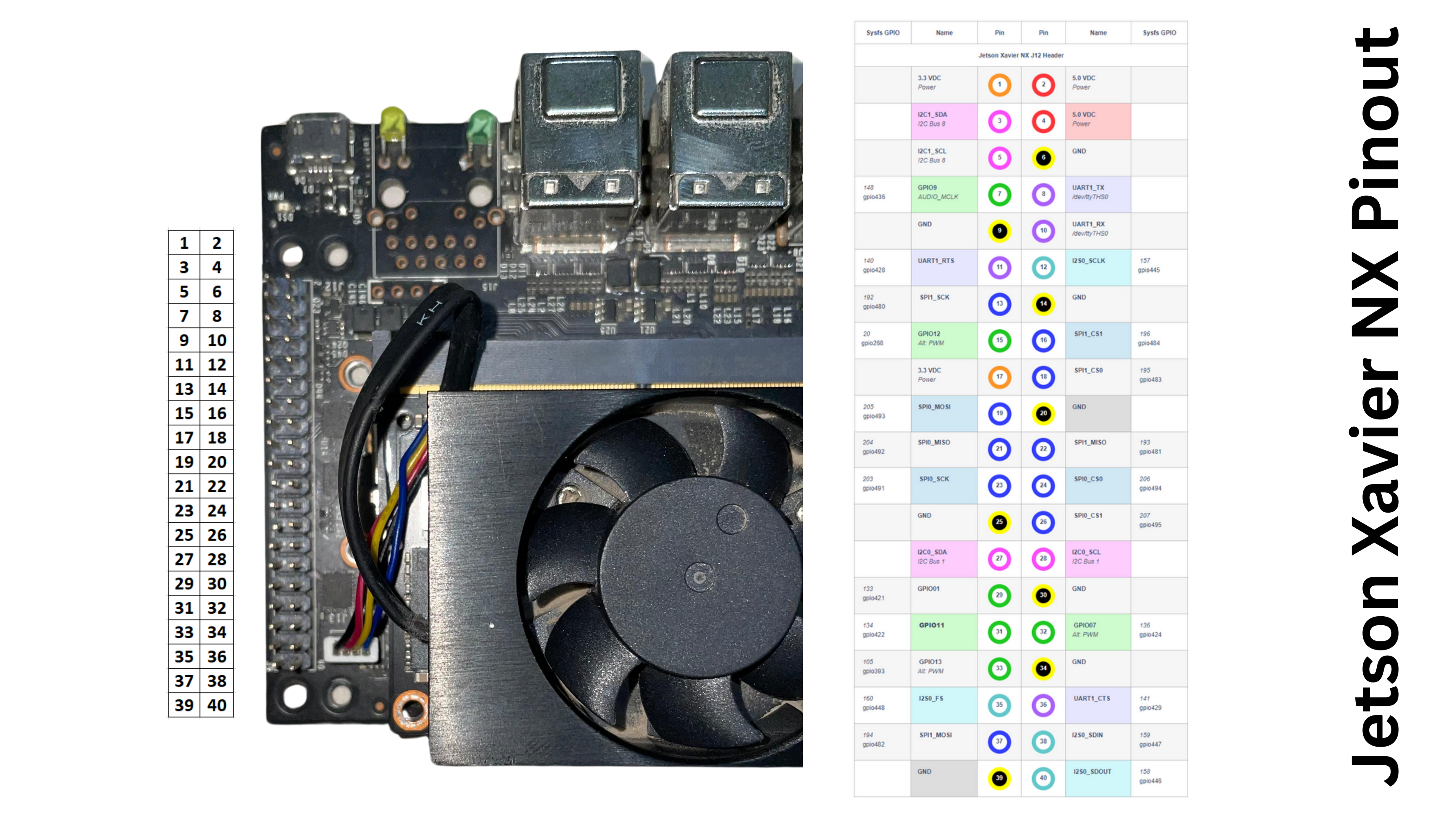 Source: https://jetsonhacks.com/nvidia-jetson-xavier-nx-gpio-header-pinout/
Source: https://jetsonhacks.com/nvidia-jetson-xavier-nx-gpio-header-pinout/
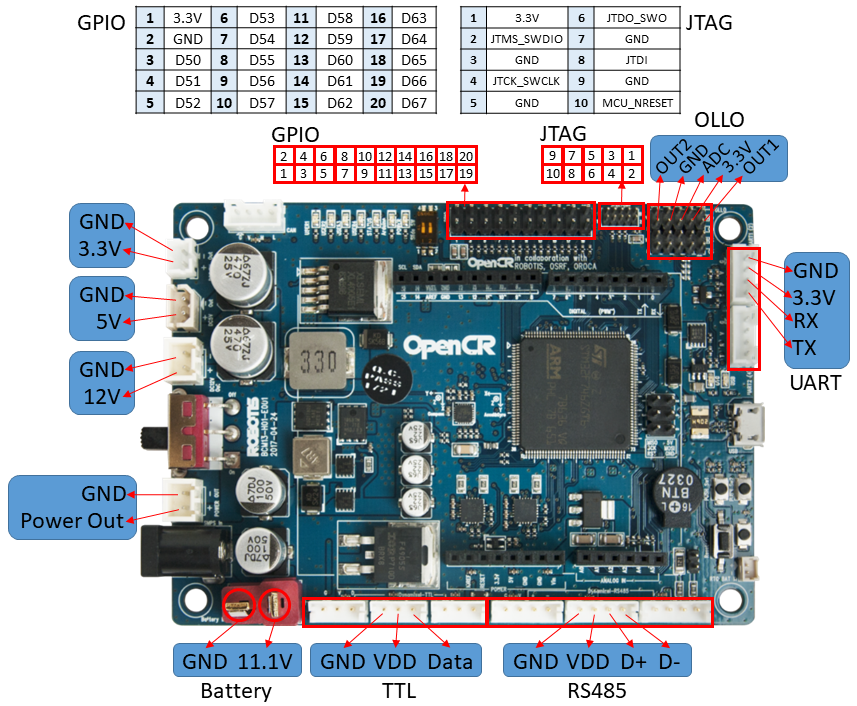
Pinout OpenCr
Jetson Wiring Connections
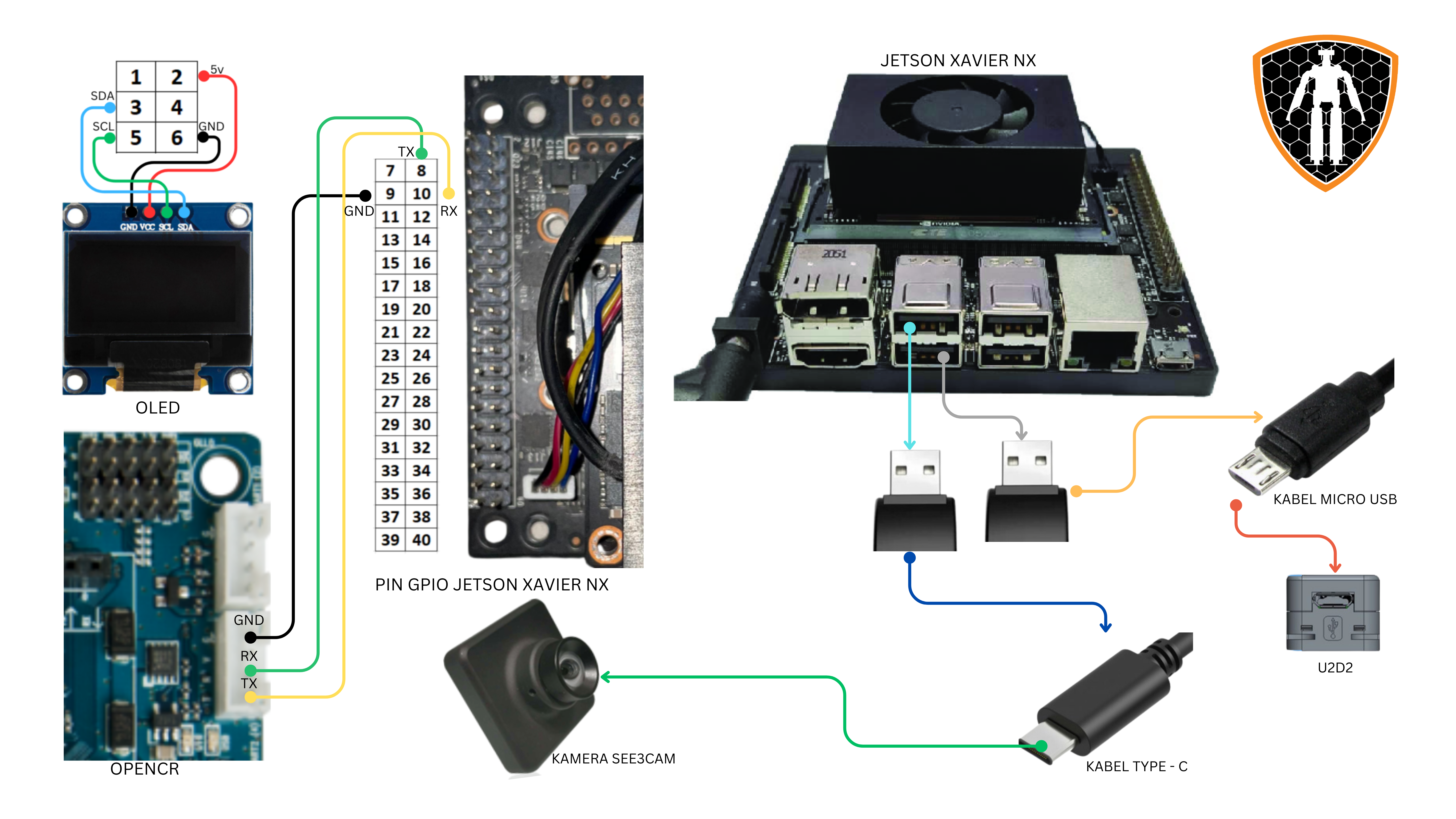
OpenCr Wiring Connections